 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for UAV-based Distributed Sensing Under Half-Duplex Operation
Paper and Code
Feb 21, 2023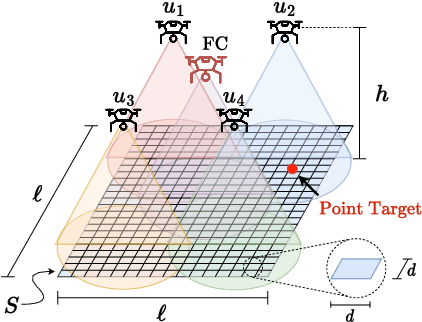
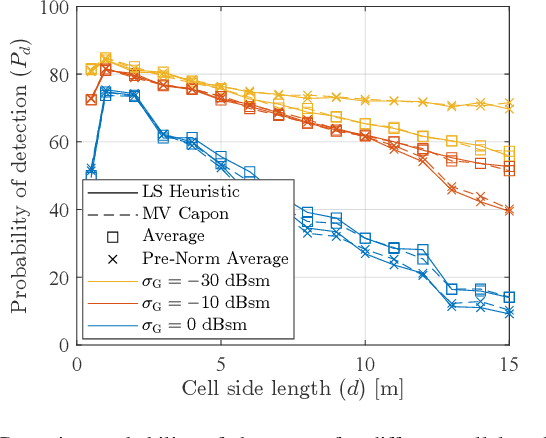
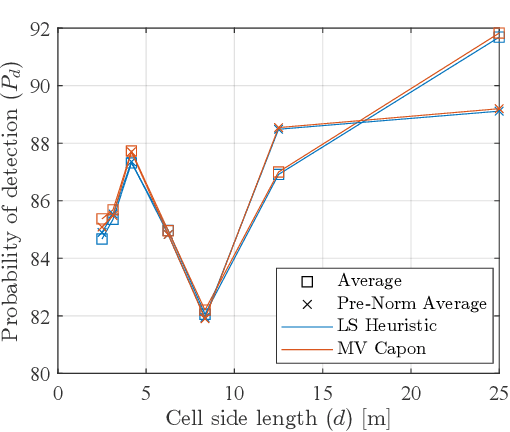
This paper proposes an unmanned aerial vehicle (UAV)-based distributed sensing framework that uses frequency-division multiplexing (OFDM) waveforms to detect the position of a ground target under half-duplex operation. The area of interest, where the target is located, is sectioned into a grid of cells, where the radar cross-section (RCS) of every cell is jointly estimated by the UAVs, and a central node acts as a fusion center by receiving all the estimations and performing information-level fusion. For local estimation at each UAV, the periodogram approach is utilised, and a digital receive beamformer is assumed. The fused RCS estimates of the grid are used to estimate the cell containing the target. Monte Carlo simulations are performed to obtain the detection probability of the proposed framework, and our results show that the proposed framework attains improved accuracy for the detection of a target than other OFDM bi-static radar approaches proposed in the literature.