 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow-Cost GNSS Simulators with Wireless Clock Synchronization for Indoor Positioning
Jun 01, 2023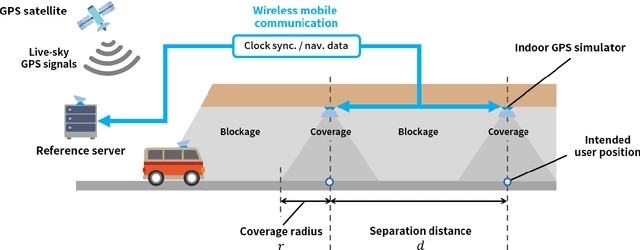
In regions where global navigation satellite systems (GNSS) signals are unavailable, such as underground areas and tunnels, GNSS simulators can be deployed for transmitting simulated GNSS signals. Then, a GNSS receiver in the simulator coverage outputs the position based on the received GNSS signals (e.g., Global Positioning System (GPS) L1 signals in this study) transmitted by the corresponding simulator. This approach provides periodic position updates to GNSS users while deploying a small number of simulators without modifying the hardware and software of user receivers. However, the simulator clock should be synchronized to the GNSS satellite clock to generate almost identical signals to the live-sky GNSS signals, which is necessary for seamless indoor and outdoor positioning handover. The conventional clock synchronization method based on the wired connection between each simulator and an outdoor GNSS antenna causes practical difficulty and increases the cost of deploying the simulators. This study proposes a wireless clock synchronization method based on a private time server and time delay calibration. Additionally, we derived the constraints for determining the optimal simulator coverage and separation between adjacent simulators. The positioning performance of the proposed GPS simulator-based indoor positioning system was demonstrated in the underground testbed for a driving vehicle with a GPS receiver and a pedestrian with a smartphone. The average position errors were 3.7 m for the vehicle and 9.6 m for the pedestrian during the field tests with successful indoor and outdoor positioning handovers. Since those errors are within the coverage of each deployed simulator, it is confirmed that the proposed system with wireless clock synchronization can effectively provide periodic position updates to users where live-sky GNSS signals are unavailable.
First Demonstration of the Korean eLoran Accuracy in a Narrow Waterway Using Improved ASF Maps
Sep 28, 2021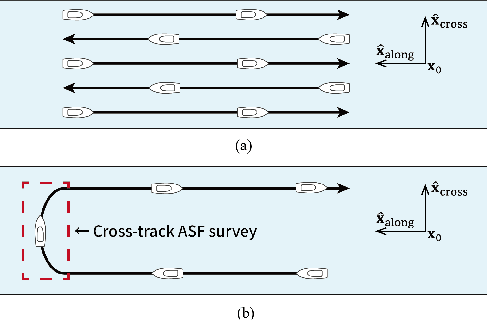
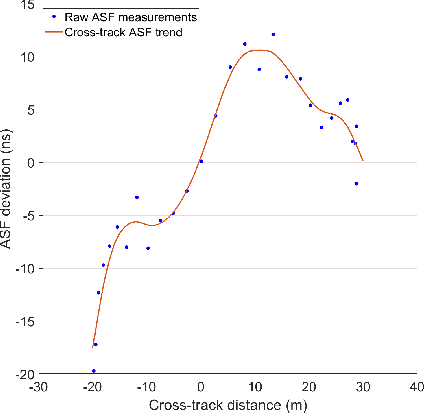
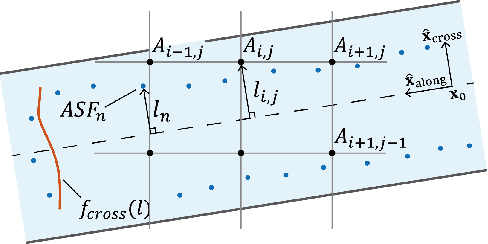
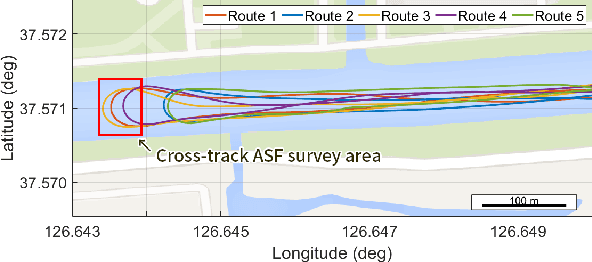
The vulnerabilities of global navigation satellite systems (GNSSs) to radio frequency jamming and spoofing have attracted significant research attention. In particular, the large-scale jamming incidents that occurred in South Korea substantiate the practical importance of implementing a complementary navigation system. This letter briefly summarizes the efforts of South Korea to deploy an enhanced long-range navigation (eLoran) system, which is a terrestrial low-frequency radio navigation system that can complement GNSSs. After four years of research and development, the Korean eLoran testbed system has been recently deployed and is operational since June 1, 2021. Although its initial performance at sea is satisfactory, navigation through a narrow waterway is still challenging because a complete survey of the additional secondary factor (ASF), which is the largest source of error for eLoran, is practically difficult in a narrow waterway. This letter proposes an alternative way to survey the ASF in a narrow waterway and improve the ASF map generation methods. Moreover, the performance of the proposed approach was validated experimentally.