 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling, Vibration Control, and Trajectory Tracking of a Kinematically Constrained Planar Hybrid Cable-Driven Parallel Robot
Dec 27, 2020



This paper presents a kinematically constrained planar hybrid cable-driven parallel robot (HCDPR) for warehousing applications as well as other potential applications such as rehabilitation. The proposed HCDPR can harness the strengths and benefits of serial and cable-driven parallel robots. Based on this robotic platform, the goal in this paper is to develop an integrated control system to reduce vibrations and improve the trajectory accuracy and performance of the HCDPR, including deriving kinematic and dynamic equations, proposing solutions for redundancy resolution and optimization of stiffness, and developing two motion and vibration control strategies (controllers I and II). Finally, different case studies are conducted to evaluate the control performance, and the results show that the controller II can achieve the goal better.
Redundancy Resolution and Disturbance Rejection via Torque Optimization in Hybrid Cable-Driven Robots
Nov 25, 2020



This paper presents redundancy resolution and disturbance rejection via torque optimization in Hybrid Cable-Driven Robots (HCDRs). To begin with, we initiate a redundant HCDR for nonlinear whole-body system modeling and model reduction. Based on the reduced dynamic model, two new methods are proposed to solve the redundancy resolution problem: joint-space torque optimization for actuated joints (TOAJ) and joint-space torque optimization for actuated and unactuated joints (TOAUJ), and they can be extended to other HCDRs. Compared to the existing approaches, this paper provides the first solution (TOAUJ-based method) for HCDRs that can solve the redundancy resolution problem as well as disturbance rejection. Additionally, this paper develops detailed algorithms targeting TOAJ and TOAUJ implementation. A simple yet effective controller is designed for generated data analysis and validation. Case studies are conducted to evaluate the performance of TOAJ and TOAUJ, and the results suggest the effectiveness of the aforementioned approaches.
Generalized Flexible Hybrid Cable-Driven Robot (HCDR): Modeling, Control, and Analysis
Nov 14, 2019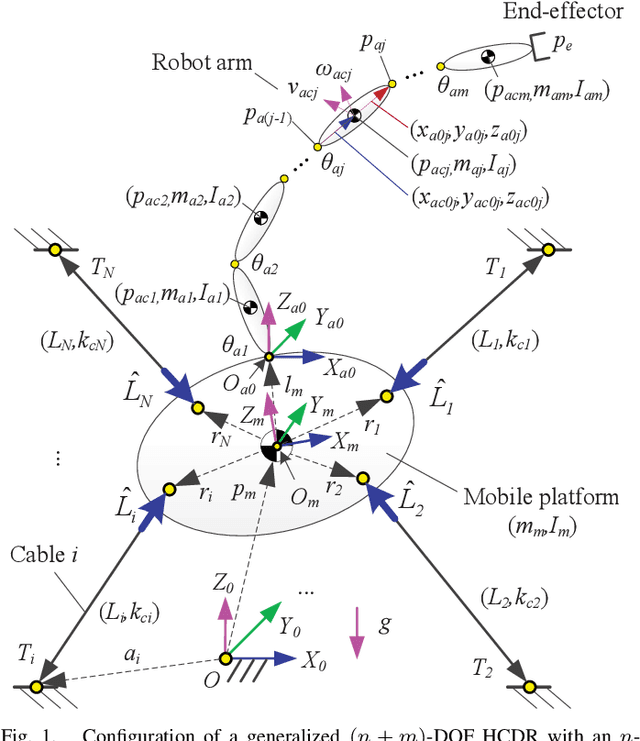
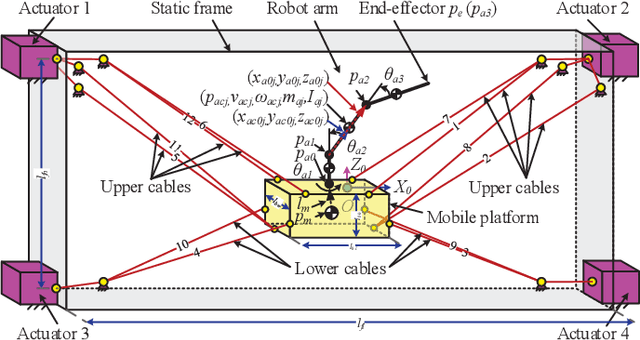
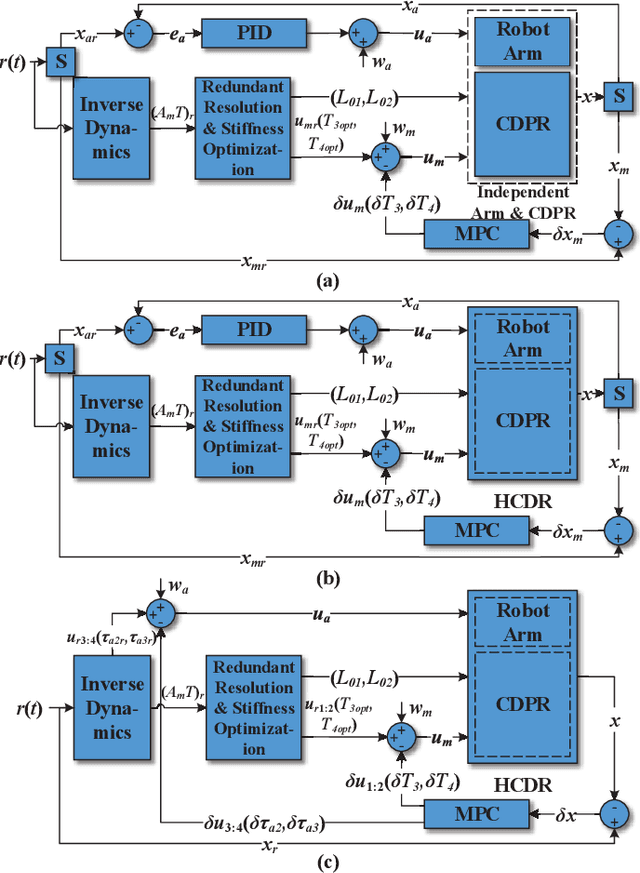
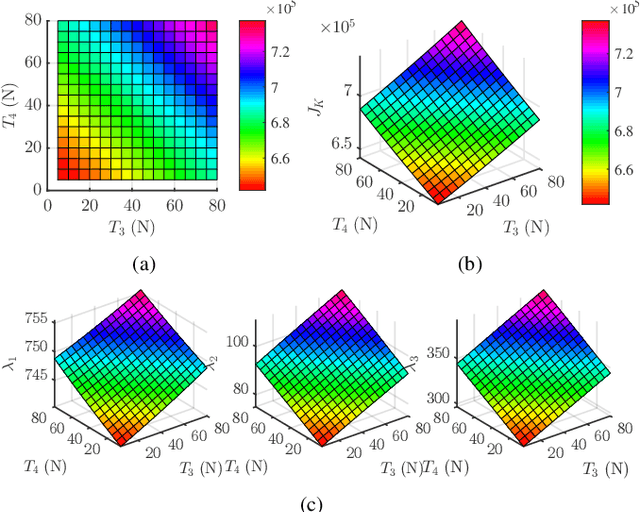
This paper presents a generalized flexible Hybrid Cable-Driven Robot (HCDR). For the proposed HCDR, the derivation of the equations of motion and proof provide a very effective way to find items for generalized system modeling. The proposed dynamic modeling approach avoids the drawback of traditional methods and can be easily extended to other types of hybrid robots such as a robot arm mounted on an aircraft platform. Additionally, another goal of this paper is to develop integrated control systems to reduce vibrations and improve the accuracy and performance of the HCDR. To achieve this goal, redundancy resolution, stiffness optimization, and control strategies are studied. The proposed optimization problem and algorithm address the limitations of existing stiffness optimization approaches. Three types of control architecture are proposed and their performances (i.e., reducing undesirable vibrations and trajectory tracking errors, especially for the end-effector) are evaluated using several well-designed case studies. Results show that the fully integrated control strategy can improve significantly the tracking performance of the end-effector.