Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views -- with Application to Fire-fighting Robots
Jul 29, 2020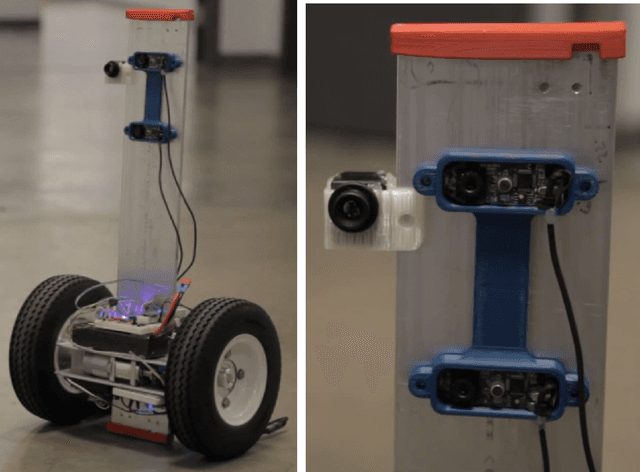
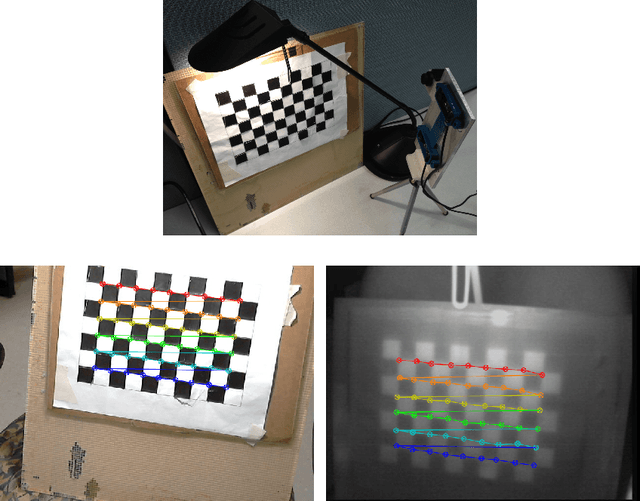
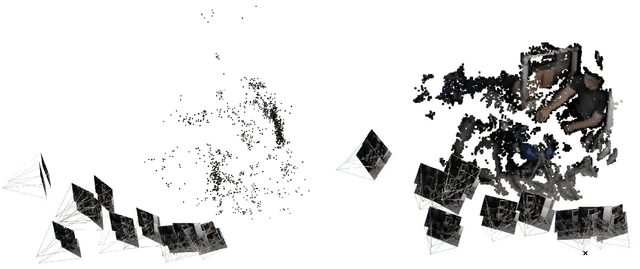
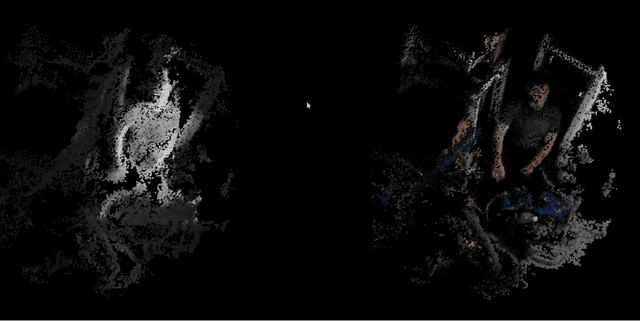
This project integrates infrared and RGB imagery to produce dense 3D environment models reconstructed from multiple views. The resulting 3D map contains both thermal and RGB information which can be used in robotic fire-fighting applications to identify victims and active fire areas.
* Technical report submitted to 2013 DRS Student Infrared Imaging
Competition
Via