 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHARDCORE: H-field and power loss estimation for arbitrary waveforms with residual, dilated convolutional neural networks in ferrite cores
Jan 23, 2024



The MagNet Challenge 2023 calls upon competitors to develop data-driven models for the material-specific, waveform-agnostic estimation of steady-state power losses in toroidal ferrite cores. The following HARDCORE (H-field and power loss estimation for Arbitrary waveforms with Residual, Dilated convolutional neural networks in ferrite COREs) approach shows that a residual convolutional neural network with physics-informed extensions can serve this task efficiently when trained on observational data beforehand. One key solution element is an intermediate model layer which first reconstructs the bh curve and then estimates the power losses based on the curve's area rendering the proposed topology physically interpretable. In addition, emphasis was placed on expert-based feature engineering and information-rich inputs in order to enable a lean model architecture. A model is trained from scratch for each material, while the topology remains the same. A Pareto-style trade-off between model size and estimation accuracy is demonstrated, which yields an optimum at as low as 1755 parameters and down to below 8\,\% for the 95-th percentile of the relative error for the worst-case material with sufficient samples.
Thermal Neural Networks: Lumped-Parameter Thermal Modeling With State-Space Machine Learning
Apr 08, 2021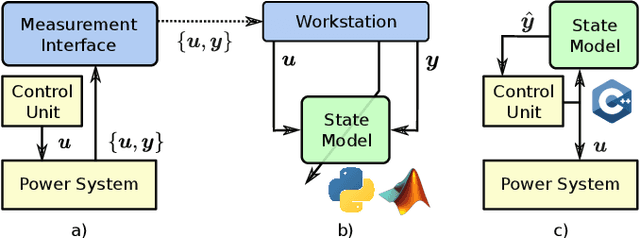


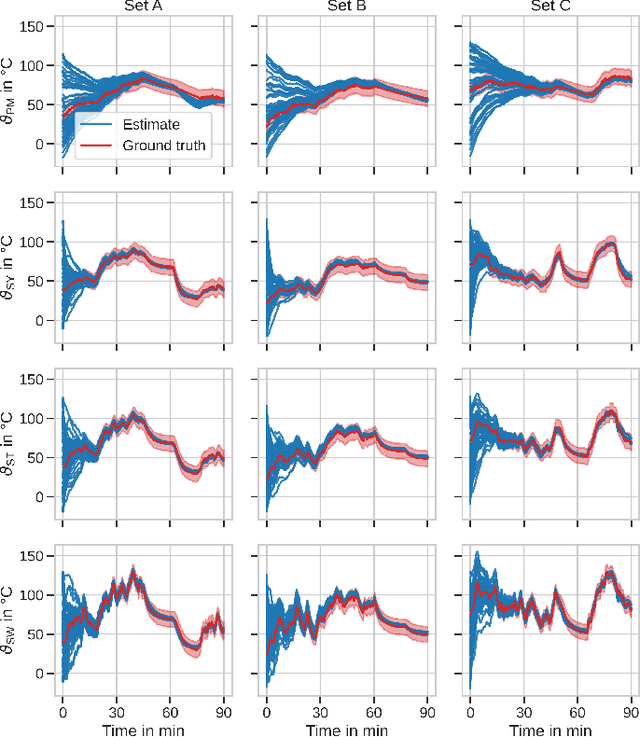
With electric power systems becoming more compact and increasingly powerful, the relevance of thermal stress especially during overload operation is expected to increase ceaselessly. Whenever critical temperatures cannot be measured economically on a sensor base, a thermal model lends itself to estimate those unknown quantities. Thermal models for electric power systems are usually required to be both, real-time capable and of high estimation accuracy. Moreover, ease of implementation and time to production play an increasingly important role. In this work, the thermal neural network (TNN) is introduced, which unifies both, consolidated knowledge in the form of heat-transfer-based lumped-parameter models, and data-driven nonlinear function approximation with supervised machine learning. A quasi-linear parameter-varying system is identified solely from empirical data, where relationships between scheduling variables and system matrices are inferred statistically and automatically. At the same time, a TNN has physically interpretable states through its state-space representation, is end-to-end trainable -- similar to deep learning models -- with automatic differentiation, and requires no material, geometry, nor expert knowledge for its design. Experiments on an electric motor data set show that a TNN achieves higher temperature estimation accuracies than previous white-/grey- or black-box models with a mean squared error of $3.18~\text{K}^2$ and a worst-case error of $5.84~\text{K}$ at 64 model parameters.
Data-Driven Permanent Magnet Temperature Estimation in Synchronous Motors with Supervised Machine Learning
Jan 17, 2020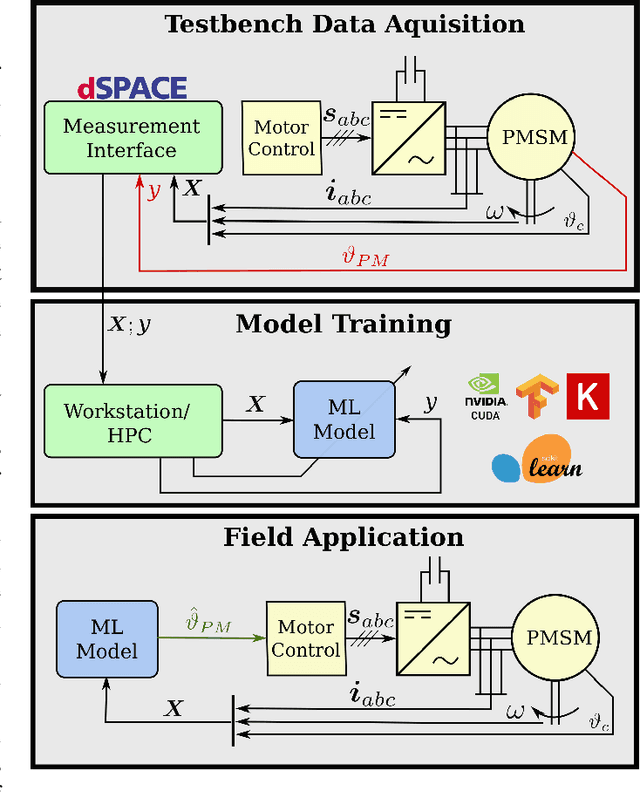

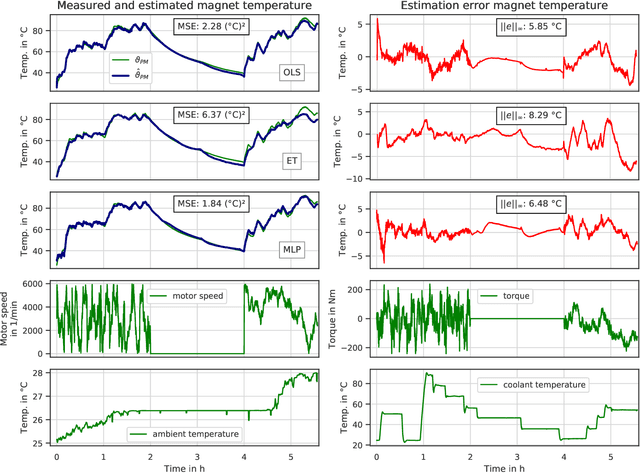

Monitoring the magnet temperature in permanent magnet synchronous motors (PMSMs) for automotive applications is a challenging task for several decades now, as signal injection or sensor-based methods still prove unfeasible in a commercial context. Overheating results in severe motor deterioration and is thus of high concern for the machine's control strategy and its design. Lack of precise temperature estimations leads to lesser device utilization and higher material cost. In this work, several machine learning (ML) models are empirically evaluated on their estimation accuracy for the task of predicting latent high-dynamic magnet temperature profiles. The range of selected algorithms covers as diverse approaches as possible with ordinary and weighted least squares, support vector regression, $k$-nearest neighbors, randomized trees and neural networks. Having test bench data available, it is shown that ML approaches relying merely on collected data meet the estimation performance of classical thermal models built on thermodynamic theory, yet not all kinds of models render efficient use of large datasets or sufficient modeling capacities. Especially linear regression and simple feed-forward neural networks with optimized hyperparameters mark strong predictive quality at low to moderate model sizes.
Towards a Reinforcement Learning Environment Toolbox for Intelligent Electric Motor Control
Oct 21, 2019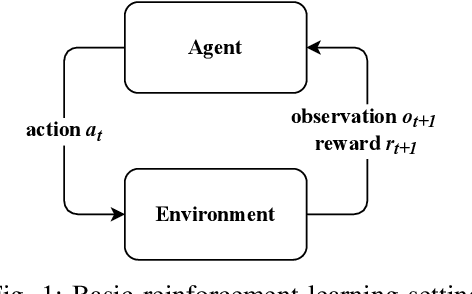



Electric motors are used in many applications and their efficiency is strongly dependent on their control. Among others, PI approaches or model predictive control methods are well-known in the scientific literature and industrial practice. A novel approach is to use reinforcement learning (RL) to have an agent learn electric drive control from scratch merely by interacting with a suitable control environment. RL achieved remarkable results with super-human performance in many games (e.g. Atari classics or Go) and also becomes more popular in control tasks like cartpole or swinging pendulum benchmarks. In this work, the open-source Python package gym-electric-motor (GEM) is developed for ease of training of RL-agents for electric motor control. Furthermore, this package can be used to compare the trained agents with other state-of-the-art control approaches. It is based on the OpenAI Gym framework that provides a widely used interface for the evaluation of RL-agents. The initial package version covers different DC motor variants and the prevalent permanent magnet synchronous motor as well as different power electronic converters and a mechanical load model. Due to the modular setup of the proposed toolbox, additional motor, load, and power electronic devices can be easily extended in the future. Furthermore, different secondary effects like controller interlocking time or noise are considered. An intelligent controller example based on the deep deterministic policy gradient algorithm which controls a series DC motor is presented and compared to a cascaded PI-controller as a baseline for future research. Fellow researchers are encouraged to use the framework in their RL investigations or to contribute to the functional scope (e.g. further motor types) of the package.