 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTS4Net: Two-Stage Sample Selective Strategy for Rotating Object Detection
Aug 06, 2021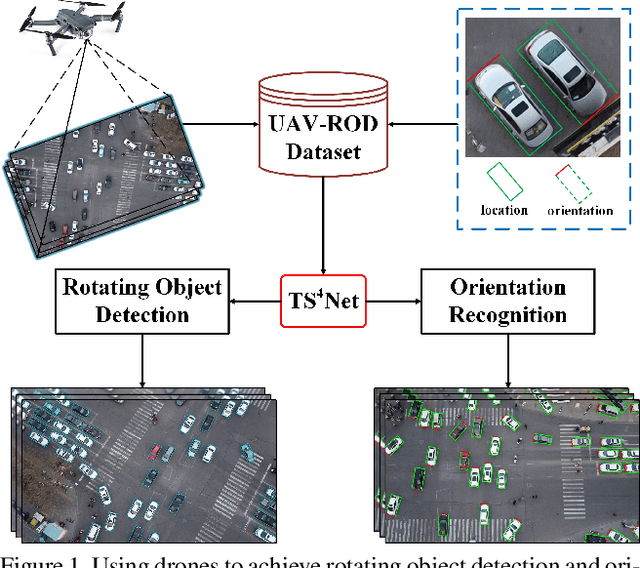
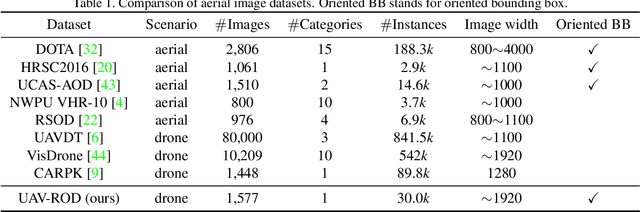
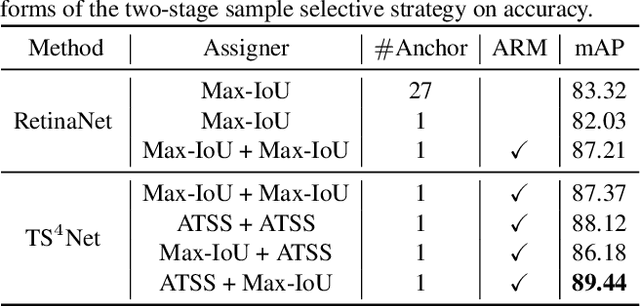
Rotating object detection has wide applications in aerial photographs, remote sensing images, UAVs, etc. At present, most of the rotating object detection datasets focus on the field of remote sensing, and these images are usually shot in high-altitude scenes. However, image datasets captured at low-altitude areas also should be concerned, such as drone-based datasets. So we present a low-altitude dronebased dataset, named UAV-ROD, aiming to promote the research and development in rotating object detection and UAV applications. The UAV-ROD consists of 1577 images and 30,090 instances of car category annotated by oriented bounding boxes. In particular, The UAV-ROD can be utilized for the rotating object detection, vehicle orientation recognition and object counting tasks. Compared with horizontal object detection, the regression stage of the rotation detection is a tricky problem. In this paper, we propose a rotating object detector TS4Net, which contains anchor refinement module (ARM) and two-stage sample selective strategy (TS4). The ARM can convert preseted horizontal anchors into high-quality rotated anchors through twostage anchor refinement. The TS4 module utilizes different constrained sample selective strategies to allocate positive and negative samples, which is adaptive to the regression task in different stages. Benefiting from the ARM and TS4, the TS4Net can achieve superior performance for rotating object detection solely with one preseted horizontal anchor. Extensive experimental results on UAV-ROD dataset and three remote sensing datasets DOTA, HRSC2016 and UCAS-AOD demonstrate that our method achieves competitive performance against most state-of-the-art methods.