 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simplifying and Learnable Graph Convolutional Attention Network for Unsupervised Knowledge Graphs Alignment
Oct 17, 2024



The success of current Entity Alignment (EA) task depends largely on the supervision information provided by labeled data. Considering the cost of labeled data, most supervised methods are difficult to apply in practical scenarios. Therefore, more and more works based on contrastive learning, active learning or other deep learning techniques have been developed, to solve the performance bottleneck caused by the lack of labeled data. However, the existing unsupervised EA methods still have some limitations, either their modeling complexity is high or they cannot balance the effectiveness and practicality of alignment. To overcome these issues, we propose a Simplifying and Learnable graph convolutional attention network for Unsupervised Knowledge Graphs alignment method (SLU). Specifically, we first introduce LCAT, a new and simple framework as the backbone network to model the graph structure of two KGs. Then we design a reconstruction method of relation structure based on potential matching relations for efficiently filtering invalid neighborhood information of aligned entities, to improve the usability and scalability of SLU. Impressively, a similarity function based on consistency is proposed to better measure the similarity of candidate entity pairs. Finally, we conduct extensive experiments on three datasets of different sizes (15K and 100K) and different types (cross-lingual and monolingual) to verify the superiority of SLU. Experimental results show that SLU significantly improves alignment accuracy, outperforming 25 supervised or unsupervised methods, and improving 6.4% in Hits@1 over the best baseline in the best case.
Entity Alignment with Reliable Path Reasoning and Relation-Aware Heterogeneous Graph Transformer
May 18, 2022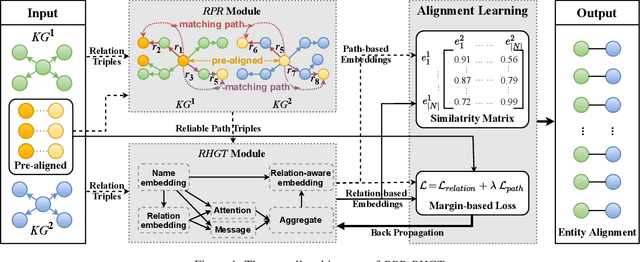
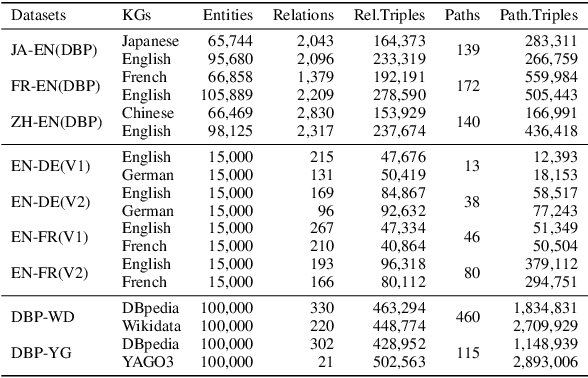
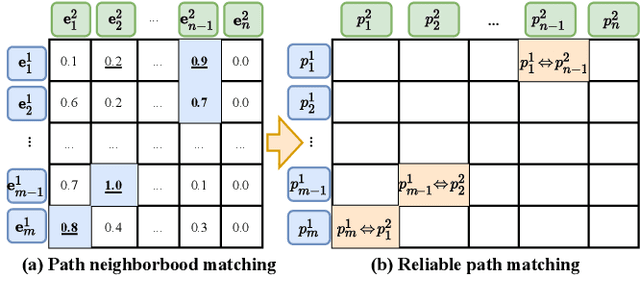

Entity Alignment (EA) has attracted widespread attention in both academia and industry, which aims to seek entities with same meanings from different Knowledge Graphs (KGs). There are substantial multi-step relation paths between entities in KGs, indicating the semantic relations of entities. However, existing methods rarely consider path information because not all natural paths facilitate for EA judgment. In this paper, we propose a more effective entity alignment framework, RPR-RHGT, which integrates relation and path structure information, as well as the heterogeneous information in KGs. Impressively, an initial reliable path reasoning algorithm is developed to generate the paths favorable for EA task from the relation structures of KGs, which is the first algorithm in the literature to successfully use unrestricted path information. In addition, to efficiently capture heterogeneous features in entity neighborhoods, a relation-aware heterogeneous graph transformer is designed to model the relation and path structures of KGs. Extensive experiments on three well-known datasets show RPR-RHGT significantly outperforms 11 state-of-the-art methods, exceeding the best performing baseline up to 8.62% on Hits@1. We also show its better performance than the baselines on different ratios of training set, and harder datasets.