 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatic object detection and segmentation in videos based on dual foregrounds difference with noise filtering
Dec 19, 2020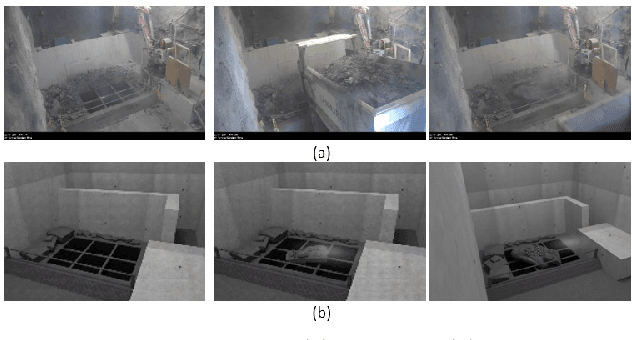

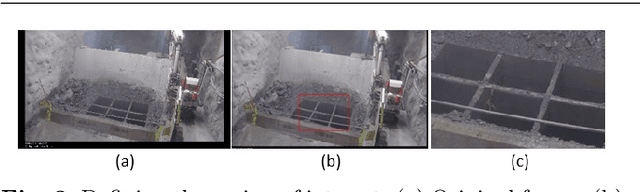
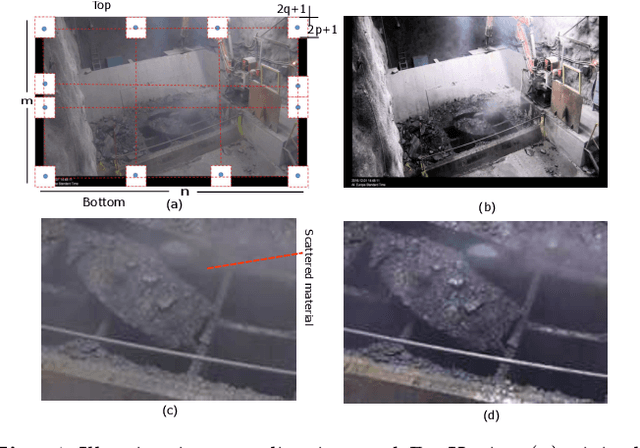
This paper presents static object detection and segmentation method in videos from cluttered scenes. Robust static object detection is still challenging task due to presence of moving objects in many surveillance applications. The level of difficulty is extremely influenced by on how you label the object to be identified as static that do not establish the original background but appeared in the video at different time. In this context, background subtraction technique based on the frame difference concept is applied to the identification of static objects. Firstly, we estimate a frame differencing foreground mask image by computing the difference of each frame with respect to a static reference frame. The Mixture of Gaussian MOG method is applied to detect the moving particles and then outcome foreground mask is subtracted from frame differencing foreground mask. Pre-processing techniques, illumination equalization and de-hazing methods are applied to handle low contrast and to reduce the noise from scattered materials in the air e.g. water droplets and dust particles. Finally, a set of mathematical morphological operation and largest connected-component analysis is applied to segment the object and suppress the noise. The proposed method was built for rock breaker station application and effectively validated with real, synthetic and two public data sets. The results demonstrate the proposed approach can robustly detect, segmented the static objects without any prior information of tracking.
The importance of silhouette optimization in 3D shape reconstruction system from multiple object scenes
Dec 19, 2020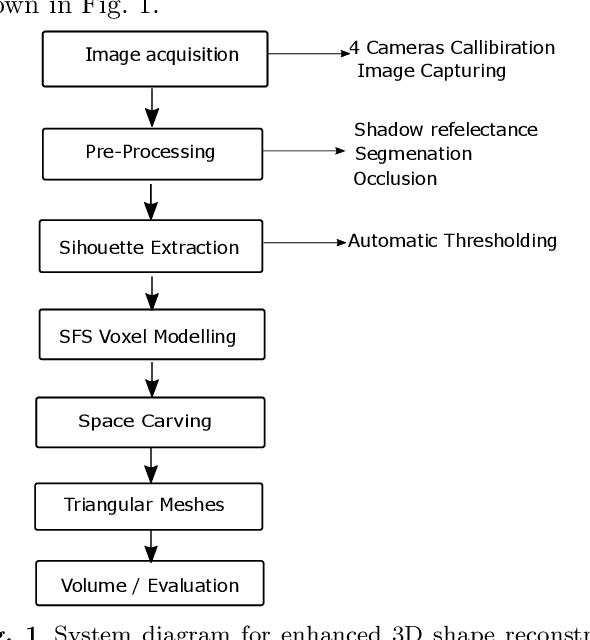

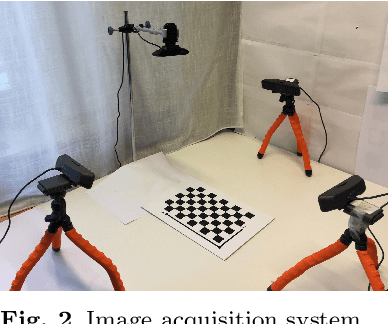

This paper presents a multi stage 3D shape reconstruction system of multiple object scenes by considering the silhouette inconsistencies in shape-from silhouette SFS method. These inconsistencies are common in multiple view images due to object occlusions in different views, segmentation and shadows or reflection due to objects or light directions. These factors raise huge challenges when attempting to construct the 3D shape by using existing approaches which reconstruct only that part of the volume which projects consistently in all the silhouettes, leaving the rest unreconstructed. As a result, final shape are not robust due to multi view objects occlusion and shadows. In this regard, we consider the primary factors affecting reconstruction by analyzing the multiple images and perform pre-processing steps to optimize the silhouettes. Finally, the 3D shape is reconstructed by using the volumetric approach SFS. Theory and experimental results show that, the performance of the modified algorithm was efficiently improved, which can improve the accuracy of the reconstructed shape and being robust to errors in the silhouettes, volume and computational inexpensive.