 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fast Method For Computing Principal Curvatures From Range Images
Jul 14, 2017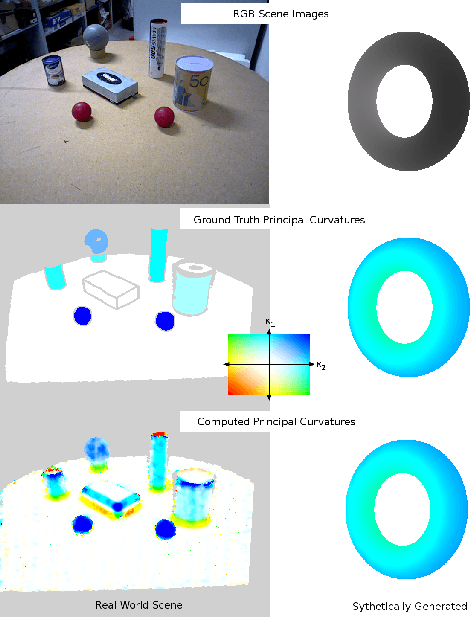
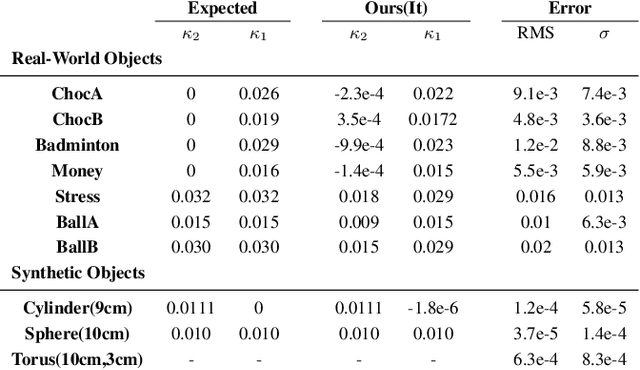
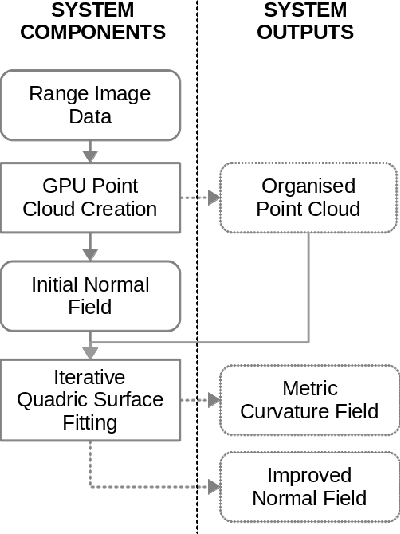
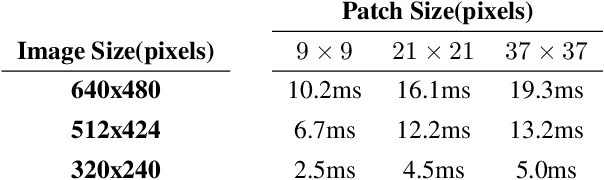
Estimation of surface curvature from range data is important for a range of tasks in computer vision and robotics, object segmentation, object recognition and robotic grasping estimation. This work presents a fast method of robustly computing accurate metric principal curvature values from noisy point clouds which was implemented on GPU. In contrast to existing readily available solutions which first differentiate the surface to estimate surface normals and then differentiate these to obtain curvature, amplifying noise, our method iteratively fits parabolic quadric surface patches to the data. Additionally previous methods with a similar formulation use less robust techniques less applicable to a high noise sensor. We demonstrate that our method is fast and provides better curvature estimates than existing techniques. In particular we compare our method to several alternatives to demonstrate the improvement.