 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Speed Control and Collision Probability Estimation Under Ego-Pose Uncertainty for Autonomous Vehicle
Mar 02, 2020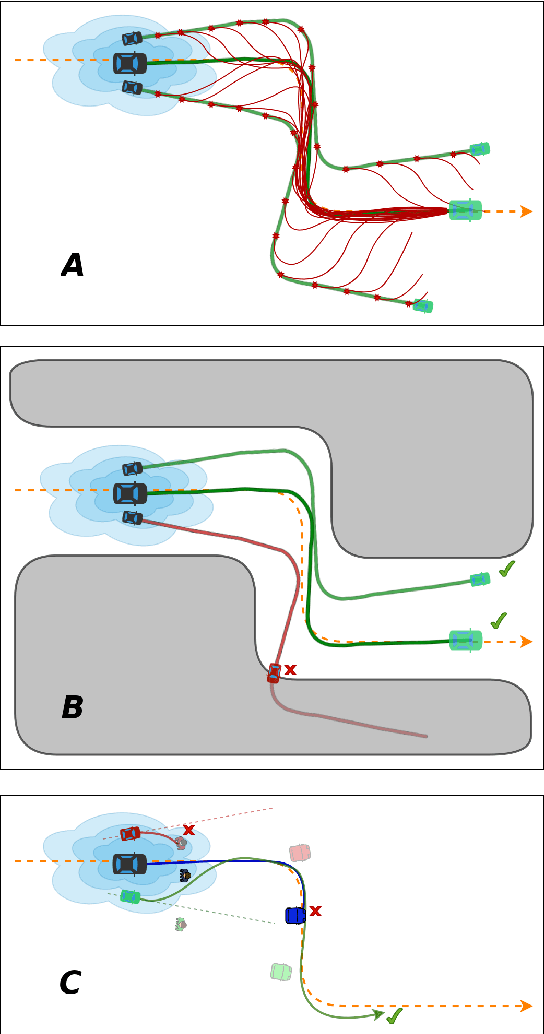
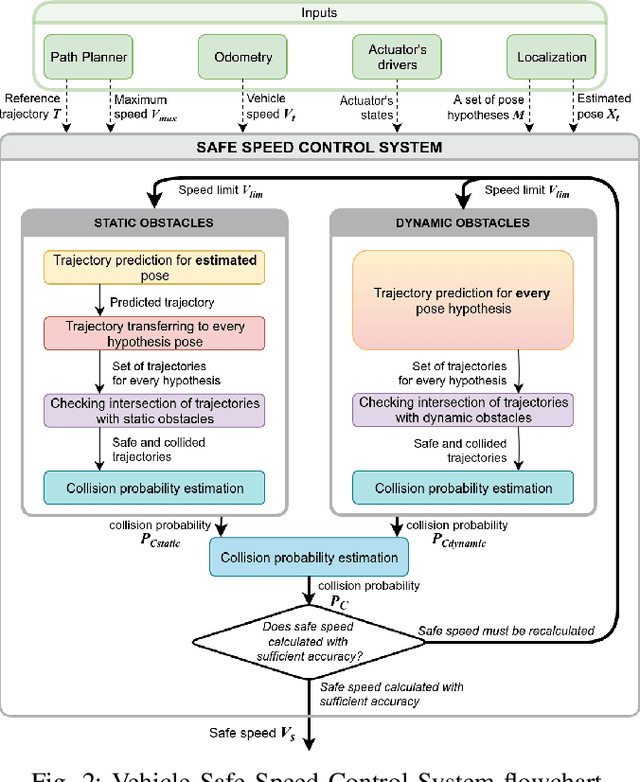
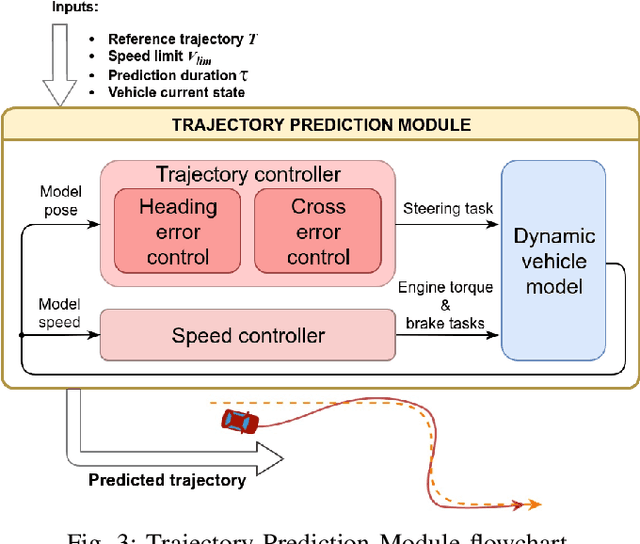
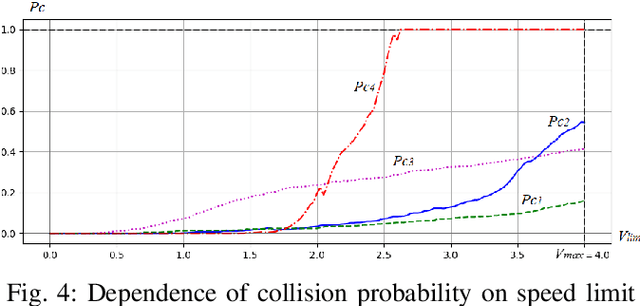
In order for autonomous vehicles to become a part of the Intelligent Transportation Ecosystem, they are required to guarantee a particular level of safety. For that to happen a safe vehicle control algorithms need to be developed, which include assessing the probability of a collision while driving along a given trajectory and selecting control signals that minimize this probability. In this paper, we propose a speed control system that estimates a collision probability taking into account static and dynamic obstacles as well as ego-pose uncertainty and chooses the maximum safe speed. For that, the planned trajectory is converted by the control system into control signals that form input for the dynamic vehicle model. The model predicts a real vehicle path. The predicted trajectory is generated for each particle -- a weighted by a probability hypothesis of the localization system about the vehicle pose. Based on the predicted particles' trajectories, the probability of collision is calculated, and a decision is made on the maximum safe speed. The proposed algorithm was validated on the real autonomous vehicle. The experimental results demonstrate that the proposed speed control system reduces the vehicle speed to a safe value when performing maneuvers and driving through narrow openings. Therefore the observed behavior of the system is mimicking a human driver behavior when driving in difficult and ambiguous traffic situations.
Linear Features Observation Model for Autonomous Vehicle Localization
Feb 28, 2020



Precise localization is a core ability of an autonomous vehicle. It is a prerequisite for motion planning and execution. The well-established localization approaches such as Kalman and particle filters require a probabilistic observation model allowing to compute a likelihood of measurement given a system state vector, usually vehicle pose, and a map. The higher precision of the localization system may be achieved through the development of a more sophisticated observation model considering various measurement error sources. Meanwhile model needs to be simple to be computable in real-time. This paper proposes an observation model for visually detected linear features. Examples of such features include, but not limited to, road markings and road boundaries. The proposed observation model depicts two core detection error sources: shift error and angular error. It also considers the probability of false-positive detection. The structure of the proposed model allows precomputing and incorporating the measurement error directly into the map represented by a multichannel digital image. Measurement error precomputation and storing the map as an image speeds up observation likelihood computation and in turn localization system. The experimental evaluation on real autonomous vehicle demonstrates that the proposed model allows for precise and reliable localization in a variety of scenarios.