Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D point cloud segmentation using GIS
Aug 13, 2021

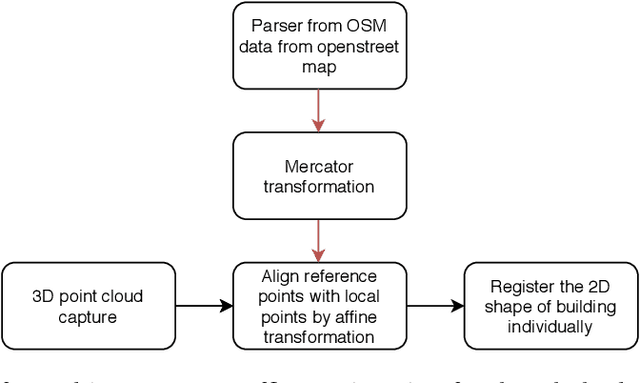
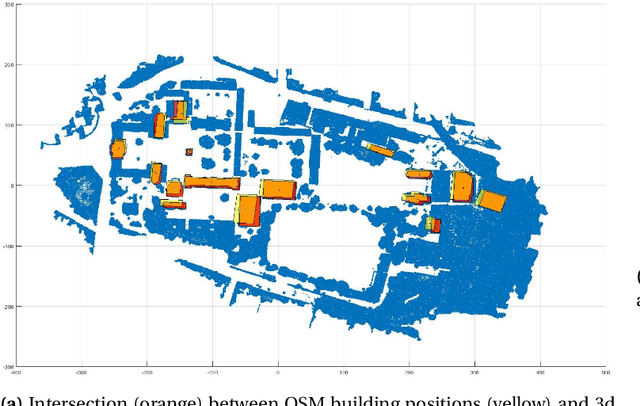
In this paper we propose an approach to perform semantic segmentation of 3D point cloud data by importing the geographic information from a 2D GIS layer (OpenStreetMap). The proposed automatic procedure identifies meaningful units such as buildings and adjusts their locations to achieve best fit between the GIS polygonal perimeters and the point cloud. Our processing pipeline is presented and illustrated by segmenting point cloud data of Trinity College Dublin (Ireland) campus constructed from optical imagery collected by a drone.
* IMVIP 2018
* 8 pages
* 8 pages
Via