 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Difference of Convex Optimization
Jul 23, 2024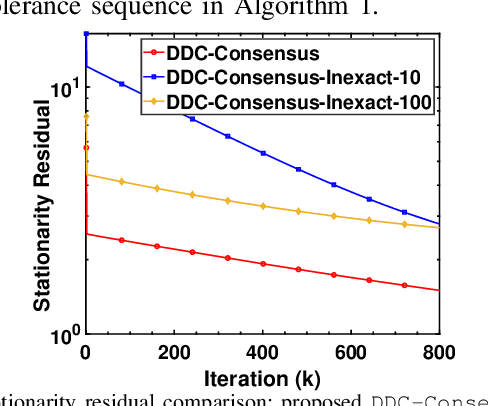
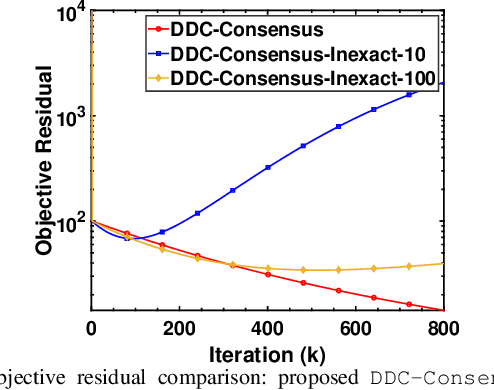
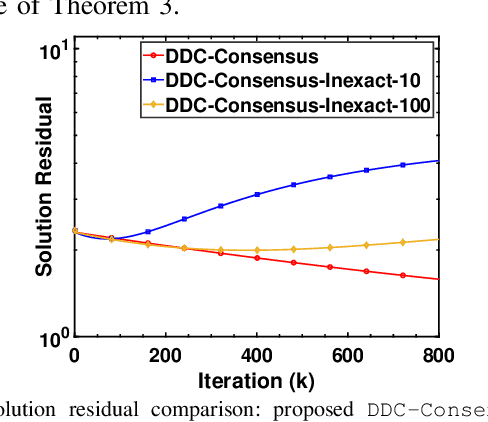
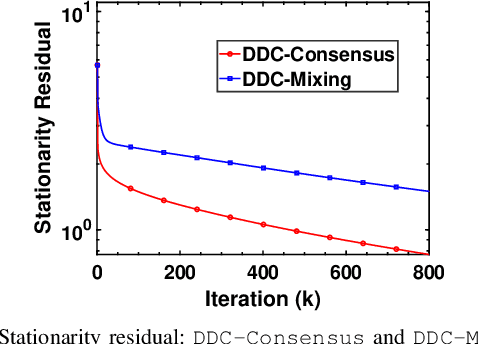
In this article, we focus on solving a class of distributed optimization problems involving $n$ agents with the local objective function at every agent $i$ given by the difference of two convex functions $f_i$ and $g_i$ (difference-of-convex (DC) form), where $f_i$ and $g_i$ are potentially nonsmooth. The agents communicate via a directed graph containing $n$ nodes. We create smooth approximations of the functions $f_i$ and $g_i$ and develop a distributed algorithm utilizing the gradients of the smooth surrogates and a finite-time approximate consensus protocol. We term this algorithm as DDC-Consensus. The developed DDC-Consensus algorithm allows for non-symmetric directed graph topologies and can be synthesized distributively. We establish that the DDC-Consensus algorithm converges to a stationary point of the nonconvex distributed optimization problem. The performance of the DDC-Consensus algorithm is evaluated via a simulation study to solve a nonconvex DC-regularized distributed least squares problem. The numerical results corroborate the efficacy of the proposed algorithm.