 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Vehicle Re-Identification via Self-Supervision
May 16, 2022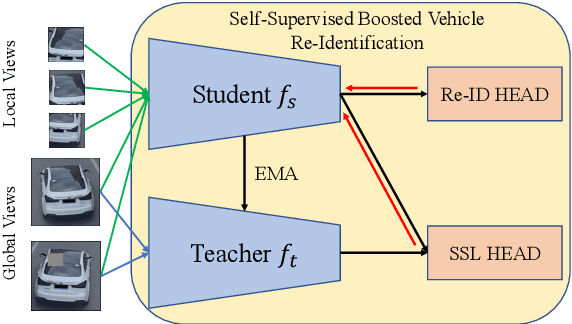
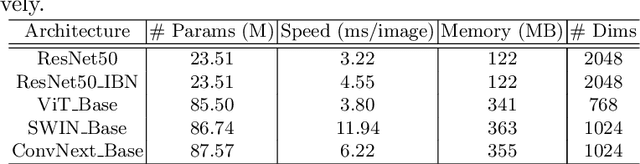


As Computer Vision technologies become more mature for intelligent transportation applications, it is time to ask how efficient and scalable they are for large-scale and real-time deployment. Among these technologies is Vehicle Re-Identification which is one of the key elements in city-scale vehicle analytics systems. Many state-of-the-art solutions for vehicle re-id mostly focus on improving the accuracy on existing re-id benchmarks and often ignore computational complexity. To balance the demands of accuracy and computational efficiency, in this work we propose a simple yet effective hybrid solution empowered by self-supervised training which only uses a single network during inference time and is free of intricate and computation-demanding add-on modules often seen in state-of-the-art approaches. Through extensive experiments, we show our approach, termed Self-Supervised and Boosted VEhicle Re-Identification (SSBVER), is on par with state-of-the-art alternatives in terms of accuracy without introducing any additional overhead during deployment. Additionally we show that our approach, generalizes to different backbone architectures which facilitates various resource constraints and consistently results in a significant accuracy boost.
Scalable and Real-time Multi-Camera Vehicle Detection, Re-Identification, and Tracking
Apr 15, 2022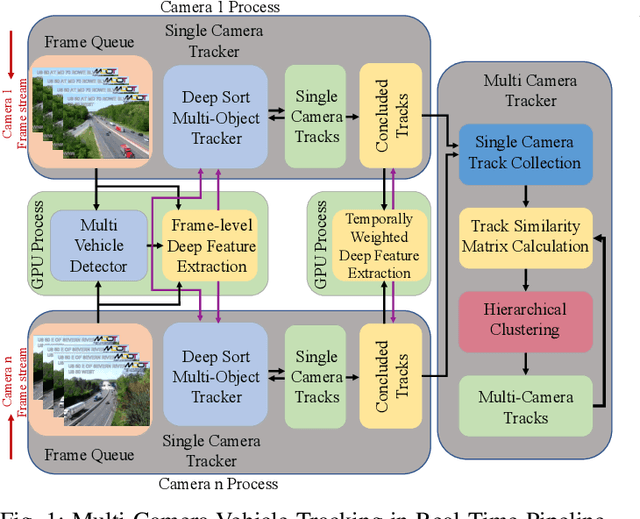

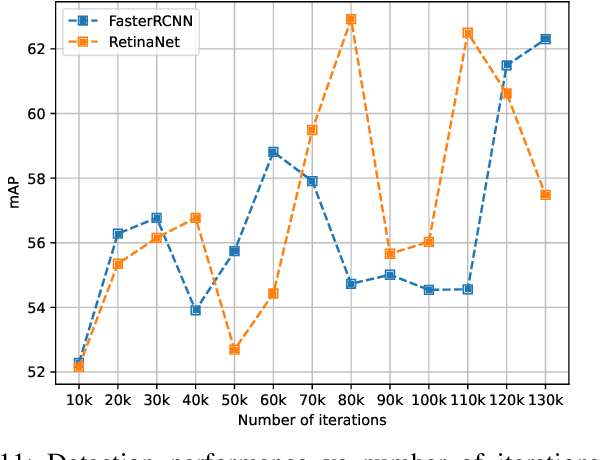
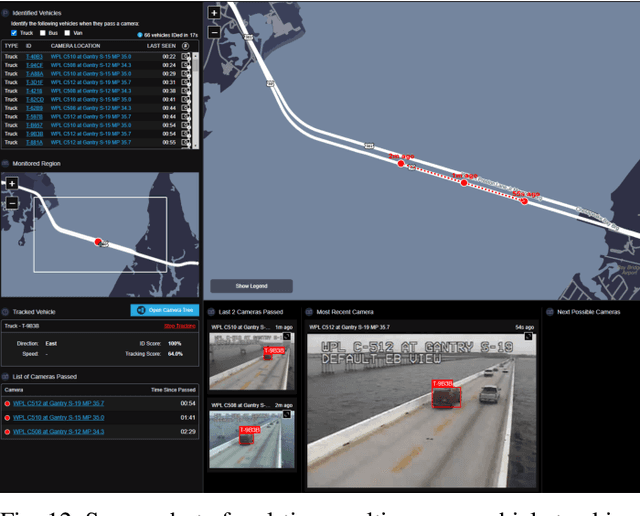
Multi-camera vehicle tracking is one of the most complicated tasks in Computer Vision as it involves distinct tasks including Vehicle Detection, Tracking, and Re-identification. Despite the challenges, multi-camera vehicle tracking has immense potential in transportation applications including speed, volume, origin-destination (O-D), and routing data generation. Several recent works have addressed the multi-camera tracking problem. However, most of the effort has gone towards improving accuracy on high-quality benchmark datasets while disregarding lower camera resolutions, compression artifacts and the overwhelming amount of computational power and time needed to carry out this task on its edge and thus making it prohibitive for large-scale and real-time deployment. Therefore, in this work we shed light on practical issues that should be addressed for the design of a multi-camera tracking system to provide actionable and timely insights. Moreover, we propose a real-time city-scale multi-camera vehicle tracking system that compares favorably to computationally intensive alternatives and handles real-world, low-resolution CCTV instead of idealized and curated video streams. To show its effectiveness, in addition to integration into the Regional Integrated Transportation Information System (RITIS), we participated in the 2021 NVIDIA AI City multi-camera tracking challenge and our method is ranked among the top five performers on the public leaderboard.