 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn mistakes we made in prior Computational Psychiatry Data driven approach projects and how they jeopardize translation of those findings in clinical practice
Jun 11, 2020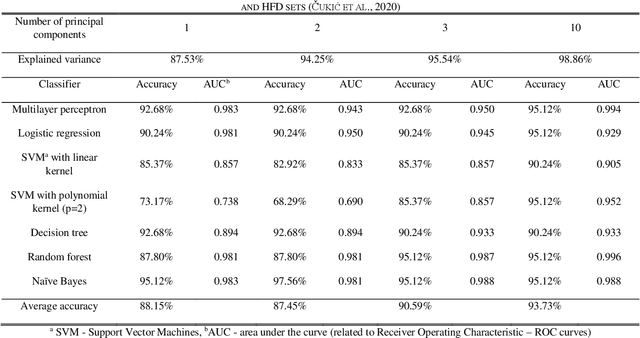
After performing comparison of the performance of seven different machine learning models on detection depression tasks to show that the choice of features is essential, we compare our methods and results with the published work of other researchers. In the end we summarize optimal practices in order that this useful classification solution can be translated to clinical practice with high accuracy and better acceptance.
Dyna-H: a heuristic planning reinforcement learning algorithm applied to role-playing-game strategy decision systems
Jul 30, 2011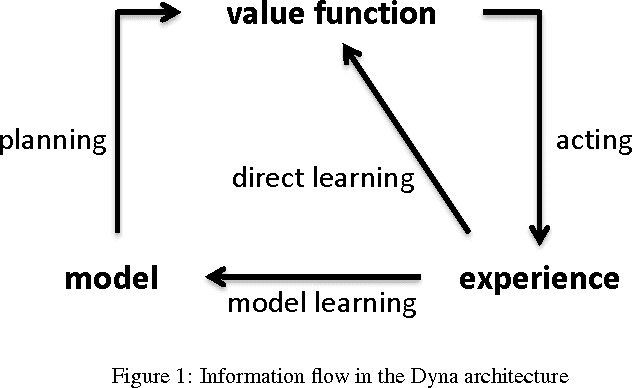
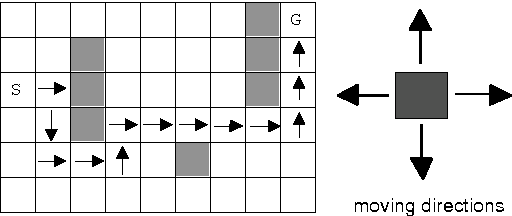
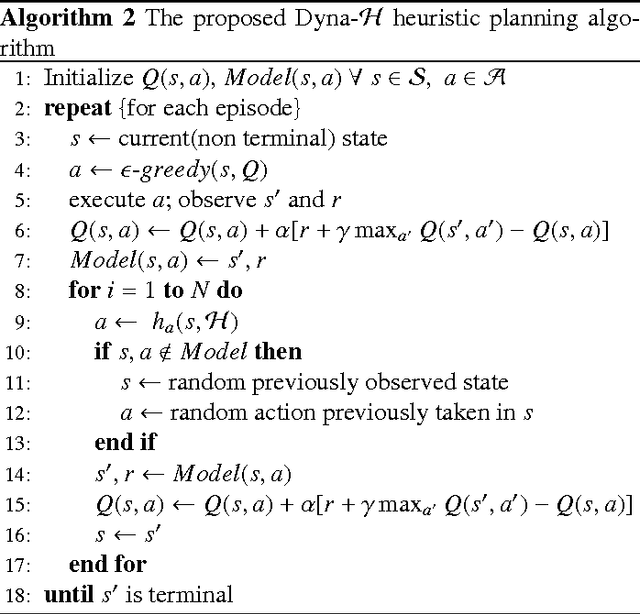
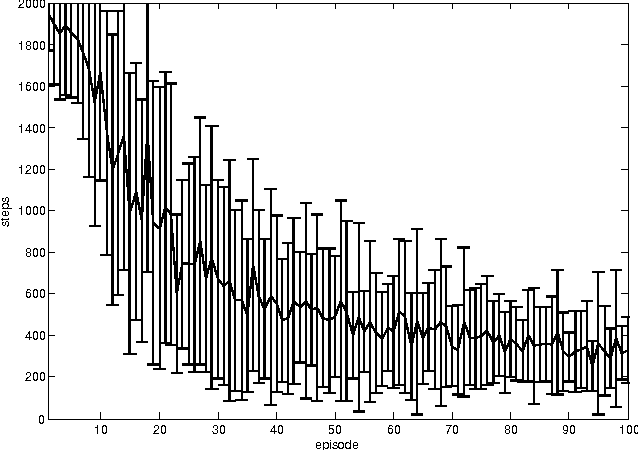
In a Role-Playing Game, finding optimal trajectories is one of the most important tasks. In fact, the strategy decision system becomes a key component of a game engine. Determining the way in which decisions are taken (online, batch or simulated) and the consumed resources in decision making (e.g. execution time, memory) will influence, in mayor degree, the game performance. When classical search algorithms such as A* can be used, they are the very first option. Nevertheless, such methods rely on precise and complete models of the search space, and there are many interesting scenarios where their application is not possible. Then, model free methods for sequential decision making under uncertainty are the best choice. In this paper, we propose a heuristic planning strategy to incorporate the ability of heuristic-search in path-finding into a Dyna agent. The proposed Dyna-H algorithm, as A* does, selects branches more likely to produce outcomes than other branches. Besides, it has the advantages of being a model-free online reinforcement learning algorithm. The proposal was evaluated against the one-step Q-Learning and Dyna-Q algorithms obtaining excellent experimental results: Dyna-H significantly overcomes both methods in all experiments. We suggest also, a functional analogy between the proposed sampling from worst trajectories heuristic and the role of dreams (e.g. nightmares) in human behavior.