 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of an Aerial Manipulator for Contact-based Inspection
Apr 11, 2018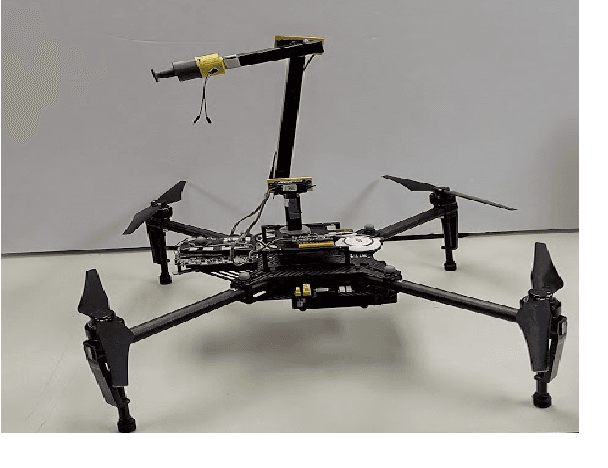
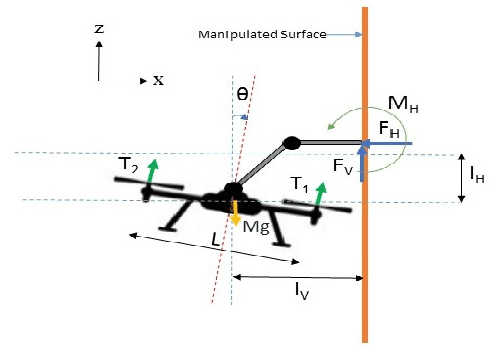
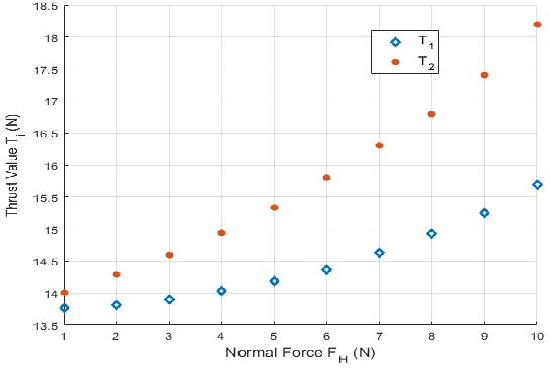

Manipulator dynamics, external forces and moments raise issues in stability and efficient control during aerial manipulation. Additionally, multirotor Micro Aerial Vehicles impose stringent limits on payload, actuation and system states. In view of these challenges, this work addressed the design and control of a 3-DoF serial aerial manipulator for contact inspection. A lightweight design with sufficient dexterous workspace for NDT (Non-Destructive Testing) inspection is presented. This operation requires the regulation of normal force on the inspected point. Contact dynamics have been discussed along with a simulation of the closed-loop dynamics during contact. The simulated controller preserves inherent system nonlinearities and uses a passivity approach to ensure the convergence of error to zero. A transition scheme from free-flight to contact was developed along with the hardware and software frameworks for implementation. This paper concludes with important drawbacks and prospects.