Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Admissible Heuristics for Kinodynamic Motion Planning via Sum-of-Squares Programming
Sep 20, 2016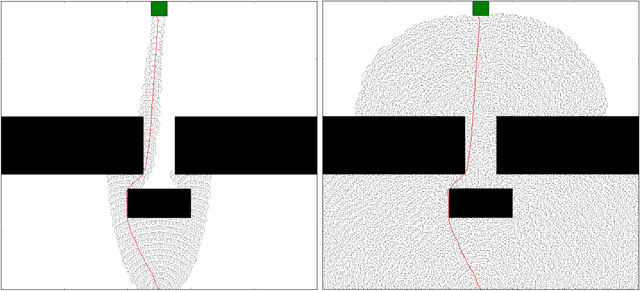
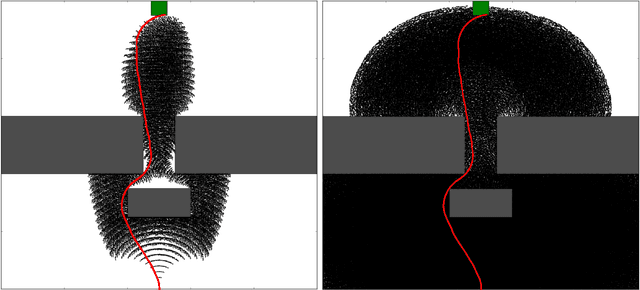
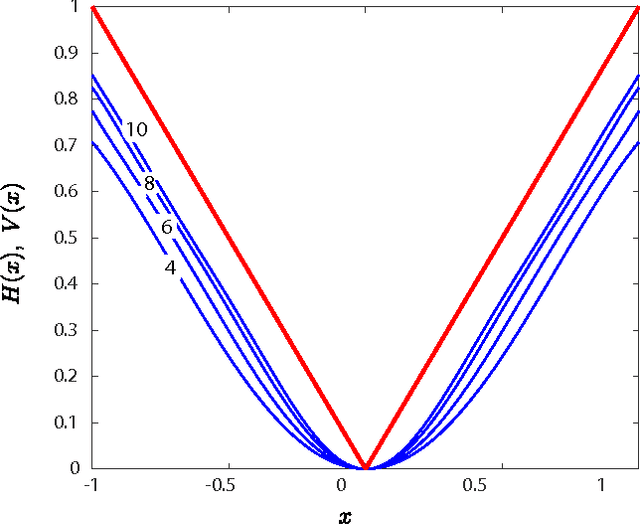

How does one obtain an admissible heuristic for a kinodynamic motion planning problem? This paper develops the analytical tools and techniques to answer this question. A sufficient condition for the admissibility of a heuristic is presented which can be checked directly from the problem data. This condition is also used to formulate a concave program to optimize an admissible heuristic. This optimization is then approximated and solved in polynomial time using sum-of-squares programming techniques. A number of examples are provided to demonstrate these concepts.
* 8 Pages
Via