 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovelty Detection on a Mobile Robot Using Habituation
Jun 02, 2000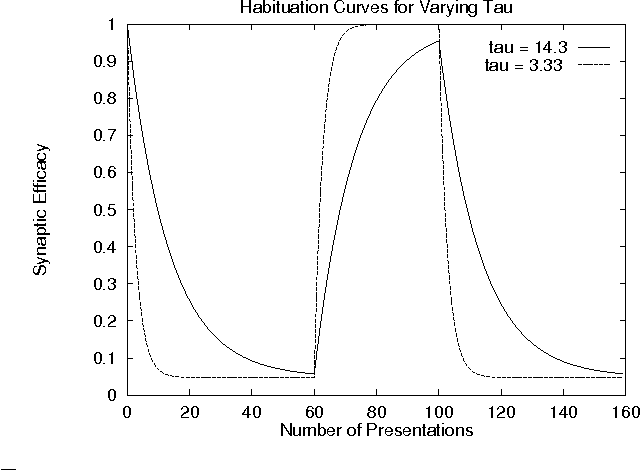
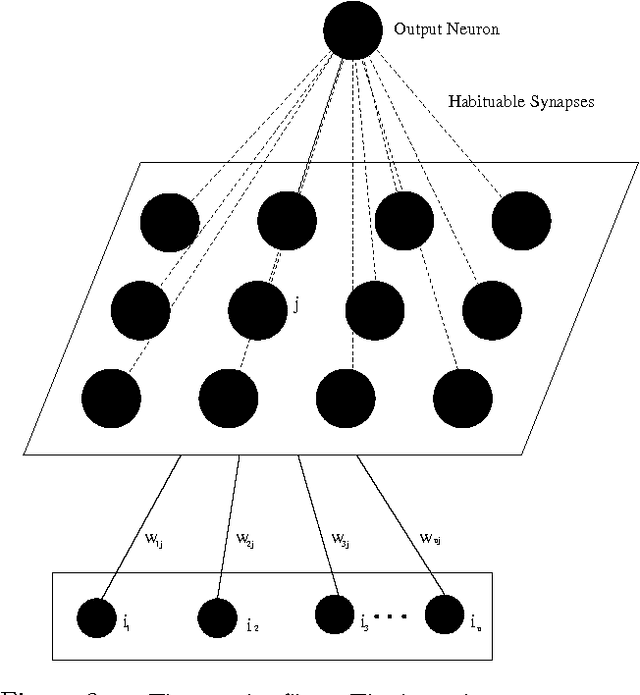
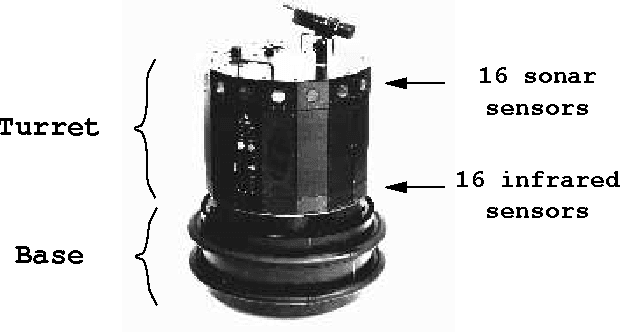
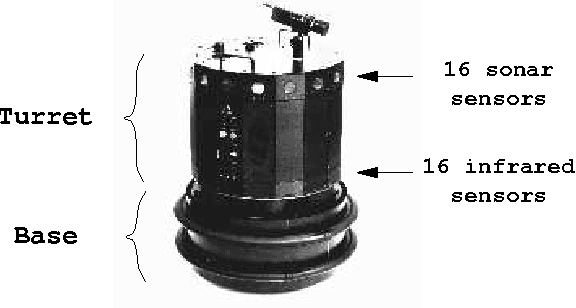
In this paper a novelty filter is introduced which allows a robot operating in an un structured environment to produce a self-organised model of its surroundings and to detect deviations from the learned model. The environment is perceived using the rob ot's 16 sonar sensors. The algorithm produces a novelty measure for each sensor scan relative to the model it has learned. This means that it highlights stimuli which h ave not been previously experienced. The novelty filter proposed uses a model of hab ituation. Habituation is a decrement in behavioural response when a stimulus is pre sented repeatedly. Robot experiments are presented which demonstrate the reliable o peration of the filter in a number of environments.
A Real-Time Novelty Detector for a Mobile Robot
Jun 02, 2000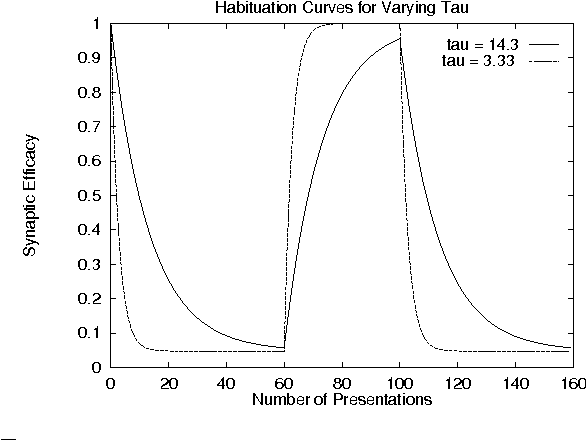
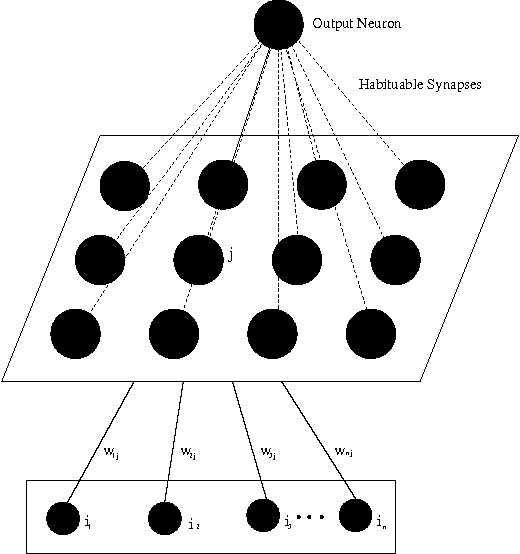
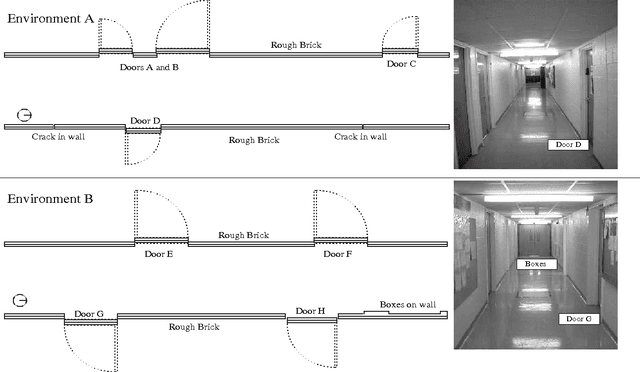
Recognising new or unusual features of an environment is an ability which is potentially very useful to a robot. This paper demonstrates an algorithm which achieves this task by learning an internal representation of `normality' from sonar scans taken as a robot explores the environment. This model of the environment is used to evaluate the novelty of each sonar scan presented to it with relation to the model. Stimuli which have not been seen before, and therefore have more novelty, are highlighted by the filter. The filter has the ability to forget about features which have been learned, so that stimuli which are seen only rarely recover their response over time. A number of robot experiments are presented which demonstrate the operation of the filter.
Novelty Detection for Robot Neotaxis
Jun 02, 2000
The ability of a robot to detect and respond to changes in its environment is potentially very useful, as it draws attention to new and potentially important features. We describe an algorithm for learning to filter out previously experienced stimuli to allow further concentration on novel features. The algorithm uses a model of habituation, a biological process which causes a decrement in response with repeated presentation. Experiments with a mobile robot are presented in which the robot detects the most novel stimulus and turns towards it (`neotaxis').