 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Risk or Not to Risk: Learning with Risk Quantification for IoT Task Offloading in UAVs
Feb 14, 2023A deep reinforcement learning technique is presented for task offloading decision-making algorithms for a multi-access edge computing (MEC) assisted unmanned aerial vehicle (UAV) network in a smart farm Internet of Things (IoT) environment. The task offloading technique uses financial concepts such as cost functions and conditional variable at risk (CVaR) in order to quantify the damage that may be caused by each risky action. The approach was able to quantify potential risks to train the reinforcement learning agent to avoid risky behaviors that will lead to irreversible consequences for the farm. Such consequences include an undetected fire, pest infestation, or a UAV being unusable. The proposed CVaR-based technique was compared to other deep reinforcement learning techniques and two fixed rule-based techniques. The simulation results show that the CVaR-based risk quantifying method eliminated the most dangerous risk, which was exceeding the deadline for a fire detection task. As a result, it reduced the total number of deadline violations with a negligible increase in energy consumption.
Reinforcement Learning Based Resource Allocation for Network Slices in O-RAN Midhaul
Nov 14, 2022Network slicing envisions the 5th generation (5G) mobile network resource allocation to be based on different requirements for different services, such as Ultra-Reliable Low Latency Communication (URLLC) and Enhanced Mobile Broadband (eMBB). Open Radio Access Network (O-RAN), proposes an open and disaggregated concept of RAN by modulizing the functionalities into independent components. Network slicing for O-RAN can significantly improve performance. Therefore, an advanced resource allocation solution for network slicing in O-RAN is proposed in this study by applying Reinforcement Learning (RL). This research demonstrates an RL compatible simplified edge network simulator with three components, user equipment(UE), Edge O-Cloud, and Regional O-Cloud. This simulator is later used to discover how to improve throughput for targeted network slice(s) by dynamically allocating unused bandwidth from other slices. Increasing the throughput for certain network slicing can also benefit the end users with a higher average data rate, peak rate, or shorter transmission time. The results show that the RL model can provide eMBB traffic with a high peak rate and shorter transmission time for URLLC compared to balanced and eMBB focus baselines.
IoT-Aerial Base Station Task Offloading with Risk-Sensitive Reinforcement Learning for Smart Agriculture
Sep 15, 2022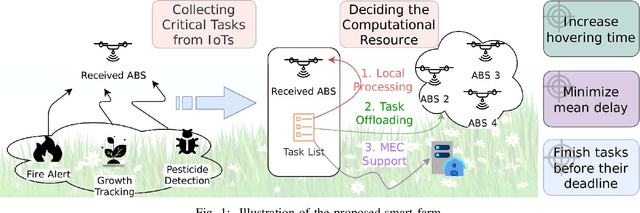
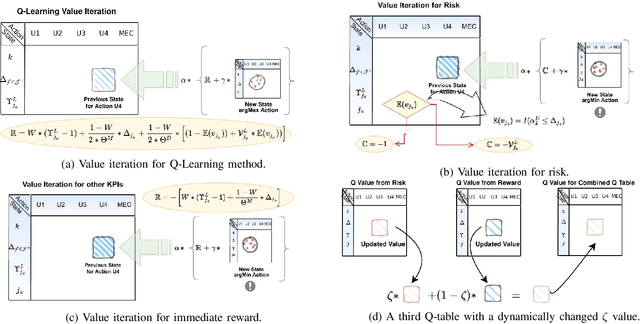
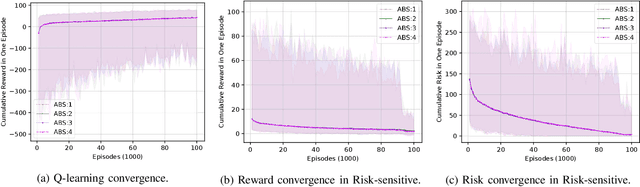
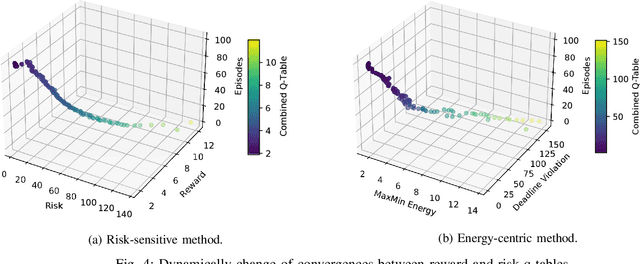
Aerial base stations (ABSs) allow smart farms to offload processing responsibility of complex tasks from internet of things (IoT) devices to ABSs. IoT devices have limited energy and computing resources, thus it is required to provide an advanced solution for a system that requires the support of ABSs. This paper introduces a novel multi-actor-based risk-sensitive reinforcement learning approach for ABS task scheduling for smart agriculture. The problem is defined as task offloading with a strict condition on completing the IoT tasks before their deadlines. Moreover, the algorithm must also consider the limited energy capacity of the ABSs. The results show that our proposed approach outperforms several heuristics and the classic Q-Learning approach. Furthermore, we provide a mixed integer linear programming solution to determine a lower bound on the performance, and clarify the gap between our risk-sensitive solution and the optimal solution, as well. The comparison proves our extensive simulation results demonstrate that our method is a promising approach for providing a guaranteed task processing services for the IoT tasks in a smart farm, while increasing the hovering time of the ABSs in this farm.
Deep Reinforcement Learning for Task Offloading in UAV-Aided Smart Farm Networks
Sep 15, 2022



The fifth and sixth generations of wireless communication networks are enabling tools such as internet of things devices, unmanned aerial vehicles (UAVs), and artificial intelligence, to improve the agricultural landscape using a network of devices to automatically monitor farmlands. Surveying a large area requires performing a lot of image classification tasks within a specific period of time in order to prevent damage to the farm in case of an incident, such as fire or flood. UAVs have limited energy and computing power, and may not be able to perform all of the intense image classification tasks locally and within an appropriate amount of time. Hence, it is assumed that the UAVs are able to partially offload their workload to nearby multi-access edge computing devices. The UAVs need a decision-making algorithm that will decide where the tasks will be performed, while also considering the time constraints and energy level of the other UAVs in the network. In this paper, we introduce a Deep Q-Learning (DQL) approach to solve this multi-objective problem. The proposed method is compared with Q-Learning and three heuristic baselines, and the simulation results show that our proposed DQL-based method achieves comparable results when it comes to the UAVs' remaining battery levels and percentage of deadline violations. In addition, our method is able to reach convergence 13 times faster than Q-Learning.