 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Path Planning for Depth Constrained Bathymetric Mapping with an Autonomous Surface Vessel
Mar 31, 2016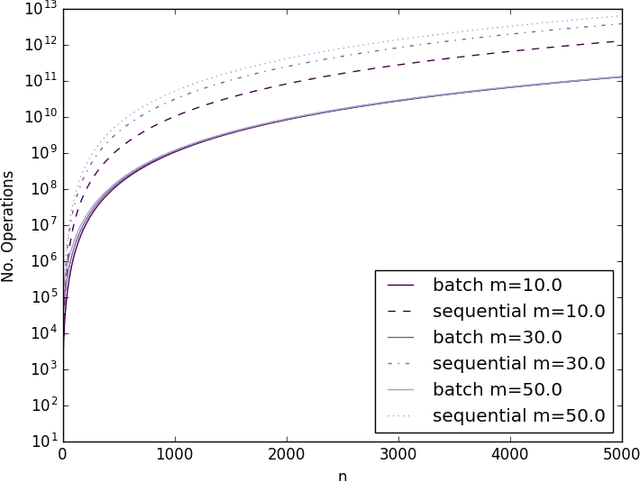
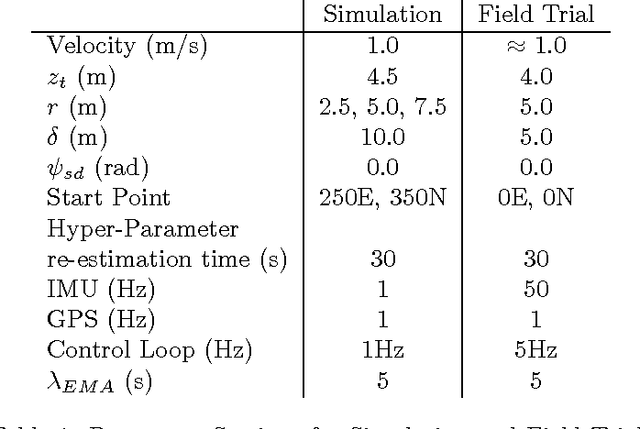
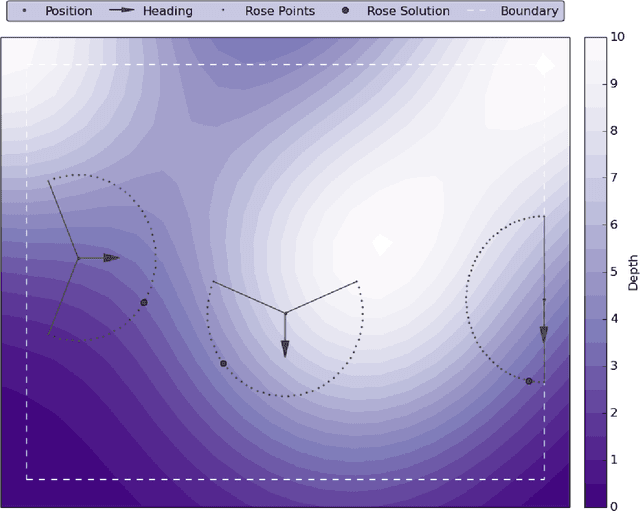
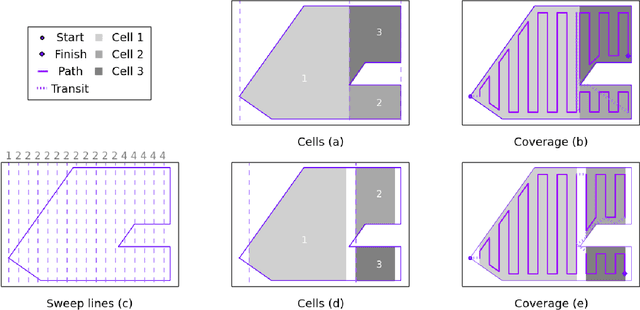
This paper describes the design, implementation and testing of a suite of algorithms to enable depth constrained autonomous bathymetric (underwater topography) mapping by an Autonomous Surface Vessel (ASV). Given a target depth and a bounding polygon, the ASV will find and follow the intersection of the bounding polygon and the depth contour as modeled online with a Gaussian Process (GP). This intersection, once mapped, will then be used as a boundary within which a path will be planned for coverage to build a map of the Bathymetry. Methods for sequential updates to GP's are described allowing online fitting, prediction and hyper-parameter optimisation on a small embedded PC. New algorithms are introduced for the partitioning of convex polygons to allow efficient path planning for coverage. These algorithms are tested both in simulation and in the field with a small twin hull differential thrust vessel built for the task.