 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection Latencies of Anomaly Detectors: An Overlooked Perspective ?
Feb 14, 2024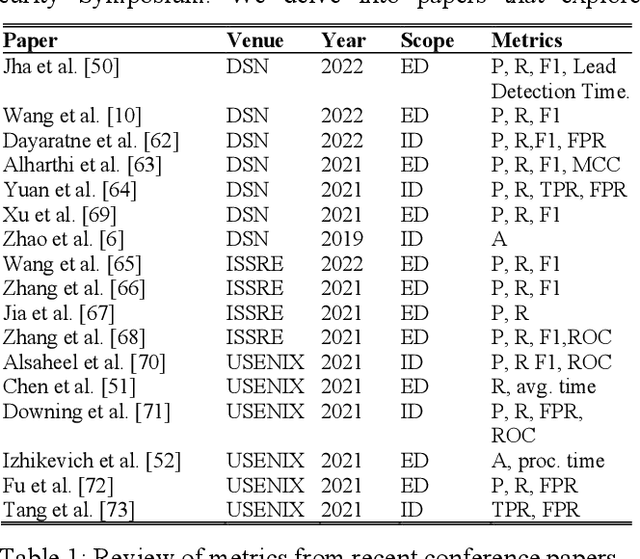
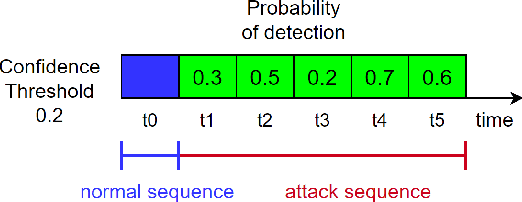
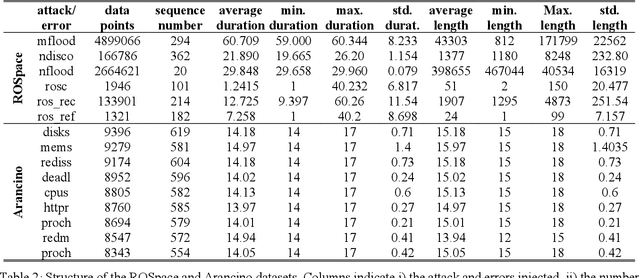
The ever-evolving landscape of attacks, coupled with the growing complexity of ICT systems, makes crafting anomaly-based intrusion detectors (ID) and error detectors (ED) a difficult task: they must accurately detect attacks, and they should promptly perform detections. Although improving and comparing the detection capability is the focus of most research works, the timeliness of the detection is less considered and often insufficiently evaluated or discussed. In this paper, we argue the relevance of measuring the temporal latency of attacks and errors, and we propose an evaluation approach for detectors to ensure a pragmatic trade-off between correct and in-time detection. Briefly, the approach relates the false positive rate with the temporal latency of attacks and errors, and this ultimately leads to guidelines for configuring a detector. We apply our approach by evaluating different ED and ID solutions in two industrial cases: i) an embedded railway on-board system that optimizes public mobility, and ii) an edge device for the Industrial Internet of Things. Our results show that considering latency in addition to traditional metrics like the false positive rate, precision, and coverage gives an additional fundamental perspective on the actual performance of the detector and should be considered when assessing and configuring anomaly detectors.
ROSpace: Intrusion Detection Dataset for a ROS2-Based Cyber-Physical System
Feb 13, 2024Most of the intrusion detection datasets to research machine learning-based intrusion detection systems (IDSs) are devoted to cyber-only systems, and they typically collect data from one architectural layer. Additionally, often the attacks are generated in dedicated attack sessions, without reproducing the realistic alternation and overlap of normal and attack actions. We present a dataset for intrusion detection by performing penetration testing on an embedded cyber-physical system built over Robot Operating System 2 (ROS2). Features are monitored from three architectural layers: the Linux operating system, the network, and the ROS2 services. The dataset is structured as a time series and describes the expected behavior of the system and its response to ROS2-specific attacks: it repeatedly alternates periods of attack-free operation with periods when a specific attack is being performed. Noteworthy, this allows measuring the time to detect an attacker and the number of malicious activities performed before detection. Also, it allows training an intrusion detector to minimize both, by taking advantage of the numerous alternating periods of normal and attack operations.
On the Efficacy of Metrics to Describe Adversarial Attacks
Jan 30, 2023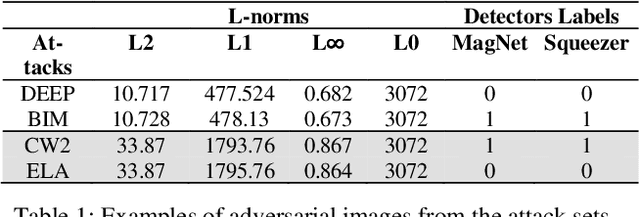
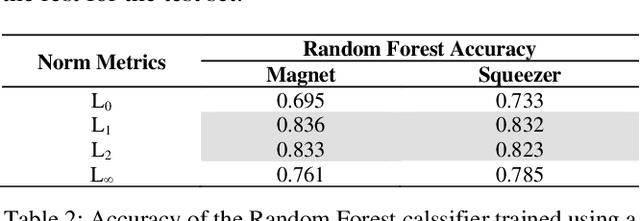
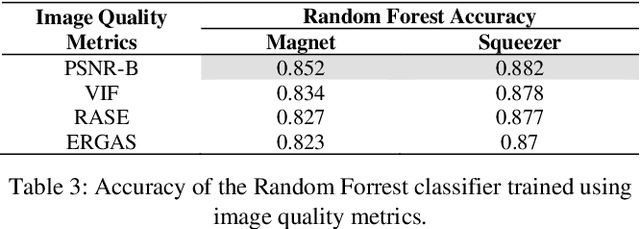
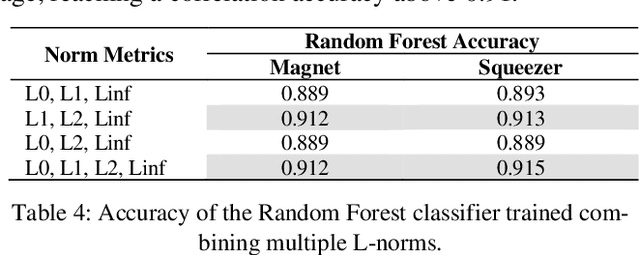
Adversarial defenses are naturally evaluated on their ability to tolerate adversarial attacks. To test defenses, diverse adversarial attacks are crafted, that are usually described in terms of their evading capability and the L0, L1, L2, and Linf norms. We question if the evading capability and L-norms are the most effective information to claim that defenses have been tested against a representative attack set. To this extent, we select image quality metrics from the state of the art and search correlations between image perturbation and detectability. We observe that computing L-norms alone is rarely the preferable solution. We observe a strong correlation between the identified metrics computed on an adversarial image and the output of a detector on such an image, to the extent that they can predict the response of a detector with approximately 0.94 accuracy. Further, we observe that metrics can classify attacks based on similar perturbations and similar detectability. This suggests a possible review of the approach to evaluate detectors, where additional metrics are included to assure that a representative attack dataset is selected.