 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversal Cross-Domain Retrieval: Generalizing Across Classes and Domains
Aug 18, 2021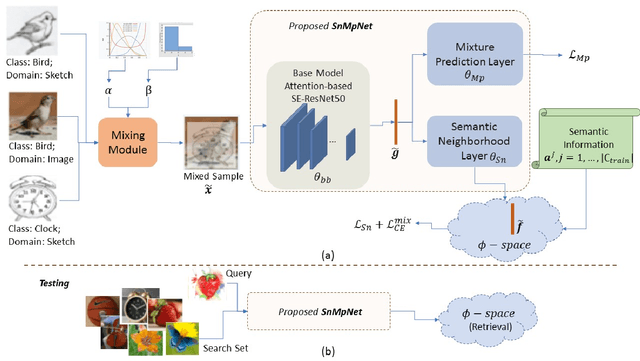



In this work, for the first time, we address the problem of universal cross-domain retrieval, where the test data can belong to classes or domains which are unseen during training. Due to dynamically increasing number of categories and practical constraint of training on every possible domain, which requires large amounts of data, generalizing to both unseen classes and domains is important. Towards that goal, we propose SnMpNet (Semantic Neighbourhood and Mixture Prediction Network), which incorporates two novel losses to account for the unseen classes and domains encountered during testing. Specifically, we introduce a novel Semantic Neighborhood loss to bridge the knowledge gap between seen and unseen classes and ensure that the latent space embedding of the unseen classes is semantically meaningful with respect to its neighboring classes. We also introduce a mix-up based supervision at image-level as well as semantic-level of the data for training with the Mixture Prediction loss, which helps in efficient retrieval when the query belongs to an unseen domain. These losses are incorporated on the SE-ResNet50 backbone to obtain SnMpNet. Extensive experiments on two large-scale datasets, Sketchy Extended and DomainNet, and thorough comparisons with state-of-the-art justify the effectiveness of the proposed model.
SML: Semantic Meta-learning for Few-shot Semantic Segmentation
Sep 14, 2020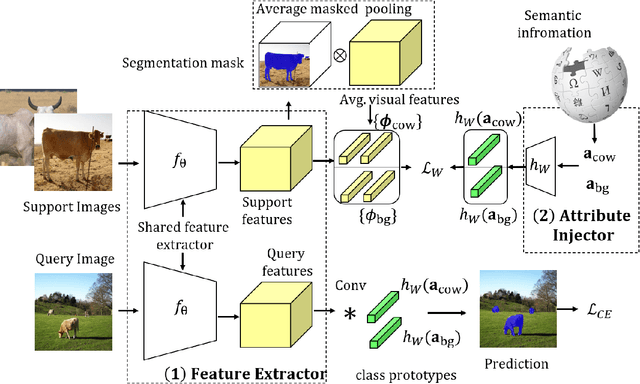
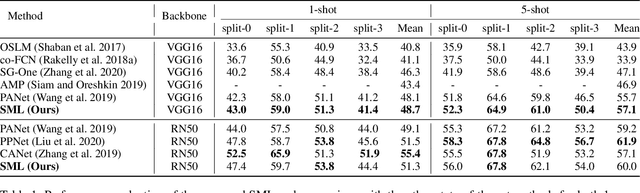
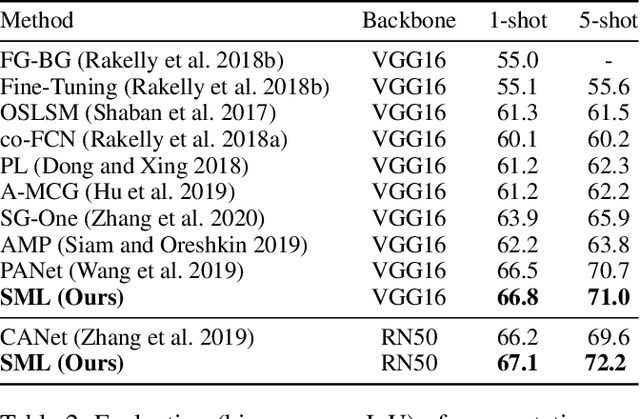
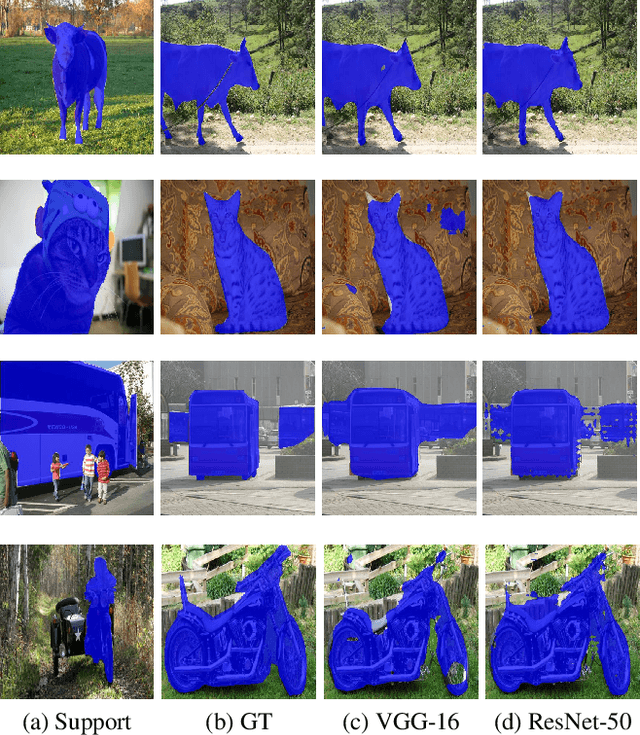
The significant amount of training data required for training Convolutional Neural Networks has become a bottleneck for applications like semantic segmentation. Few-shot semantic segmentation algorithms address this problem, with an aim to achieve good performance in the low-data regime, with few annotated training images. Recently, approaches based on class-prototypes computed from available training data have achieved immense success for this task. In this work, we propose a novel meta-learning framework, Semantic Meta-Learning (SML) which incorporates class level semantic descriptions in the generated prototypes for this problem. In addition, we propose to use the well established technique, ridge regression, to not only bring in the class-level semantic information, but also to effectively utilise the information available from multiple images present in the training data for prototype computation. This has a simple closed-form solution, and thus can be implemented easily and efficiently. Extensive experiments on the benchmark PASCAL-5i dataset under different experimental settings show the effectiveness of the proposed framework.
Unified Generator-Classifier for Efficient Zero-Shot Learning
May 11, 2019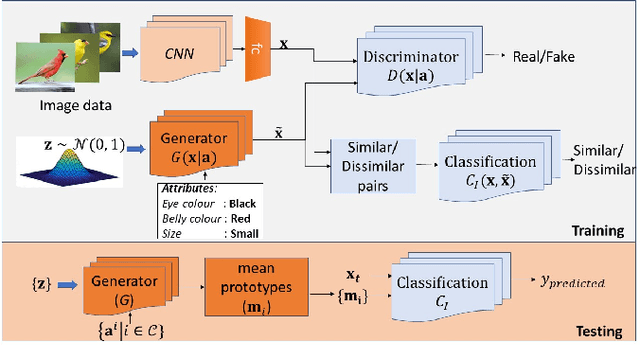
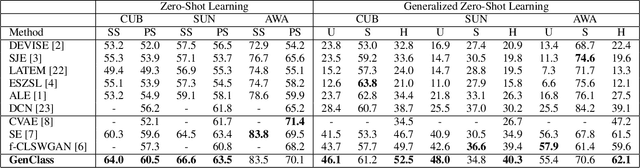

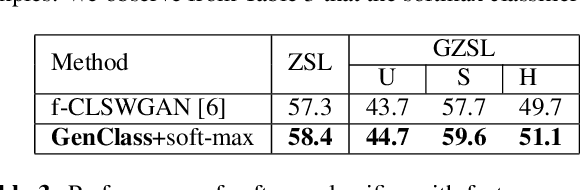
Generative models have achieved state-of-the-art performance for the zero-shot learning problem, but they require re-training the classifier every time a new object category is encountered. The traditional semantic embedding approaches, though very elegant, usually do not perform at par with their generative counterparts. In this work, we propose an unified framework termed GenClass, which integrates the generator with the classifier for efficient zero-shot learning, thus combining the representative power of the generative approaches and the elegance of the embedding approaches. End-to-end training of the unified framework not only eliminates the requirement of additional classifier for new object categories as in the generative approaches, but also facilitates the generation of more discriminative and useful features. Extensive evaluation on three standard zero-shot object classification datasets, namely AWA, CUB and SUN shows the effectiveness of the proposed approach. The approach without any modification, also gives state-of-the-art performance for zero-shot action classification, thus showing its generalizability to other domains.