Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA cable-driven parallel manipulator with force sensing capabilities for high-accuracy tissue endomicroscopy
Dec 09, 2017
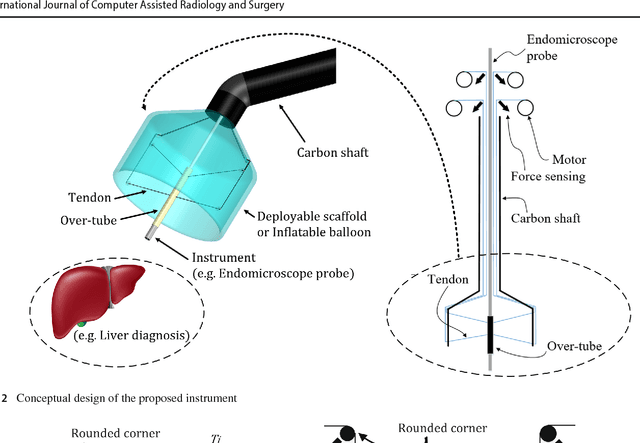
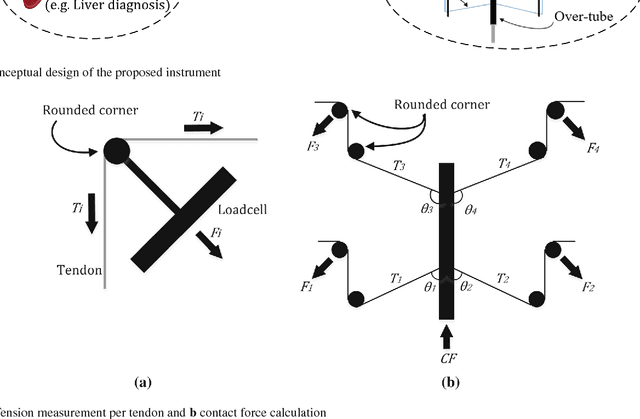
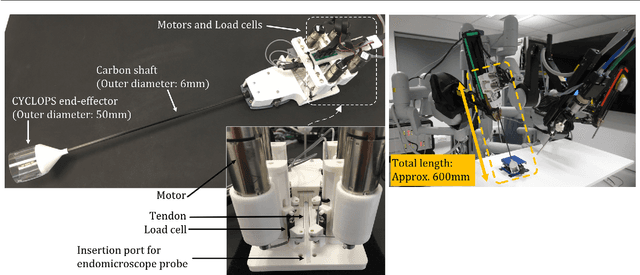
This paper introduces a new surgical end-effector probe, which allows to accurately apply a contact force on a tissue, while at the same time allowing for high resolution and highly repeatable probe movement. These are achieved by implementing a cable-driven parallel manipulator arrangement, which is deployed at the distal-end of a robotic instrument. The combination of the offered qualities can be advantageous in several ways, with possible applications including: large area endomicroscopy and multi-spectral imaging, micro-surgery, tissue palpation, safe energy-based and conventional tissue resection. To demonstrate the concept and its adaptability, the probe is integrated with a modified da Vinci robot instrument.
* Submitted to IPCAI 2018 (The 9th International Conference on
Information Processing in Computer-Assisted Interventions), 13 Pages, 12
Figures
Via