 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBig Data Application for Network Level Travel Time Prediction
Jan 15, 2022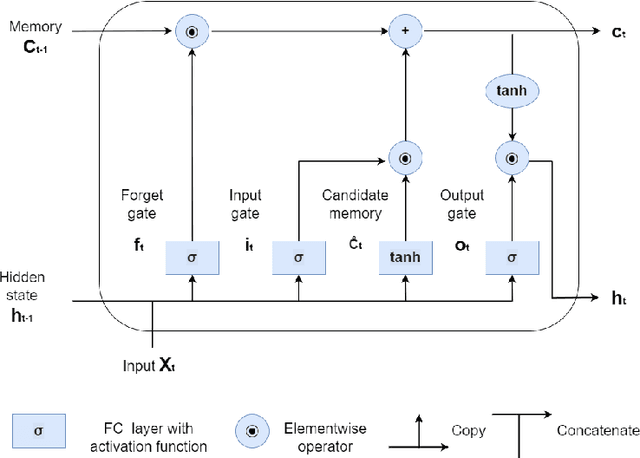
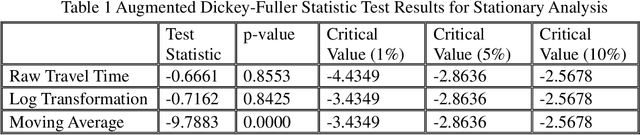
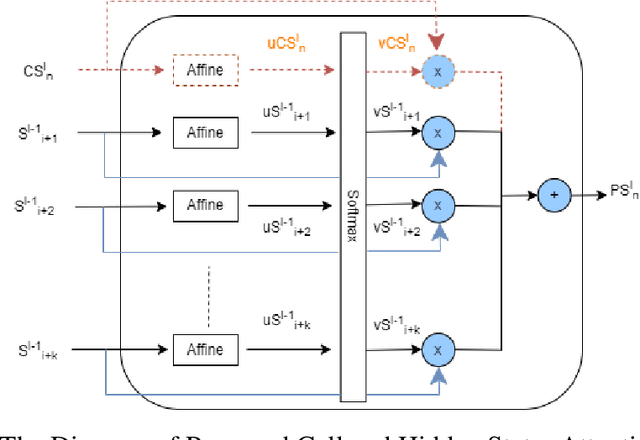
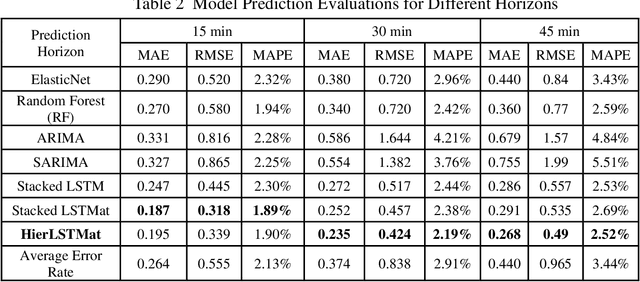
Travel time is essential in advanced traveler information systems (ATIS). This paper used the big data analytics engines Apache Spark and Apache MXNet for data processing and modeling. The efficiency gain was evaluated by comparing it with popular data science and deep learning frameworks. The hierarchical feature pooling is explored for both between layer and the output layer LSTM (Long-Short-Term-Memory). The designed hierarchical LSTM (hiLSTM) model can consider the dependencies at a different time scale to capture the spatial-temporal correlations from network-level corridor travel time. A self-attention module is then used to connect temporal and spatial features to the fully connected layers, predicting travel time for all corridors instead of a single link/route. Seasonality and autocorrelation were performed to explore the trend of time-varying data. The case study shows that the Hierarchical LSTM with Attention (hiLSTMat) model gives the best result and outperforms baseline models. The California Bay Area corridor travel time dataset covering four-year periods was published from Caltrans Performance Measurement System (PeMS) system.
Spatial-Temporal Map Vehicle Trajectory Detection Using Dynamic Mode Decomposition and Res-UNet+ Neural Networks
Jan 13, 2022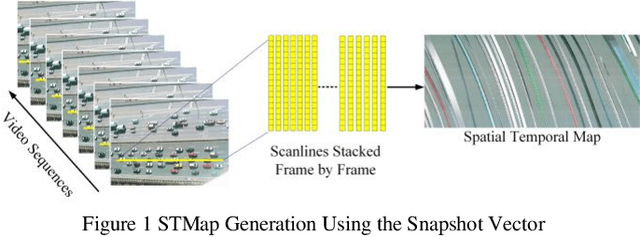
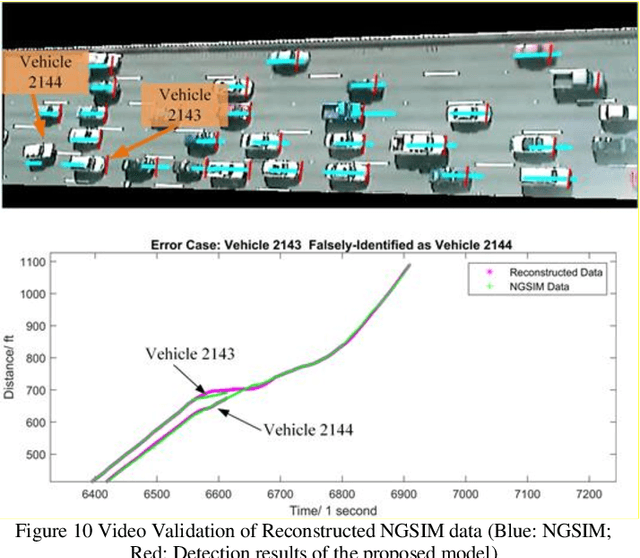
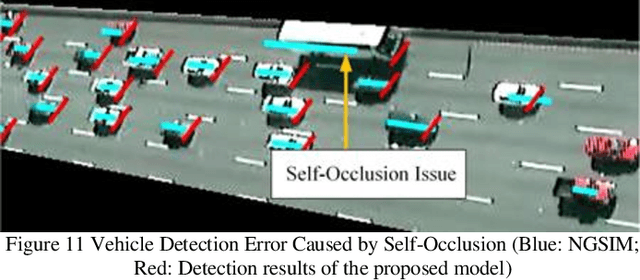
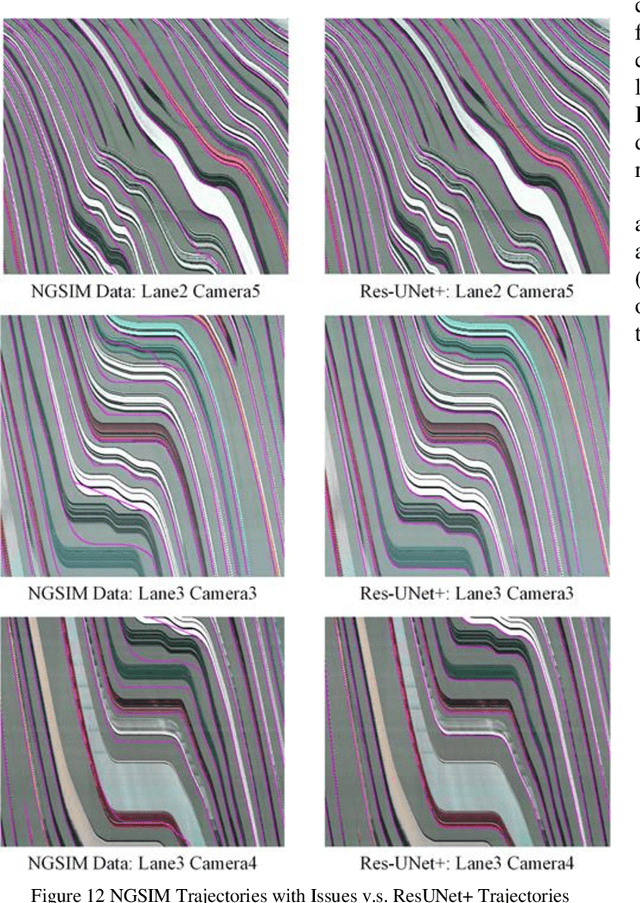
This paper presents a machine-learning-enhanced longitudinal scanline method to extract vehicle trajectories from high-angle traffic cameras. The Dynamic Mode Decomposition (DMD) method is applied to extract vehicle strands by decomposing the Spatial-Temporal Map (STMap) into the sparse foreground and low-rank background. A deep neural network named Res-UNet+ was designed for the semantic segmentation task by adapting two prevalent deep learning architectures. The Res-UNet+ neural networks significantly improve the performance of the STMap-based vehicle detection, and the DMD model provides many interesting insights for understanding the evolution of underlying spatial-temporal structures preserved by STMap. The model outputs were compared with the previous image processing model and mainstream semantic segmentation deep neural networks. After a thorough evaluation, the model is proved to be accurate and robust against many challenging factors. Last but not least, this paper fundamentally addressed many quality issues found in NGSIM trajectory data. The cleaned high-quality trajectory data are published to support future theoretical and modeling research on traffic flow and microscopic vehicle control. This method is a reliable solution for video-based trajectory extraction and has wide applicability.