 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Braking on a Nonplanar Road
Jun 03, 2024We present an approach for predictive braking of a four-wheeled vehicle on a nonplanar road. Our main contribution is a methodology to consider friction and road contact safety on general smooth road geometry. We use this to develop an active safety system to preemptively reduce vehicle speed for upcoming road geometry, such as off-camber turns. Our system may be used for human-driven or autonomous vehicles and we demonstrate it with a simulated ADAS scenario. We show that loss of control due to driver error on nonplanar roads can be mitigated by our approach.
A General 3D Road Model for Motorcycle Racing
Jun 03, 2024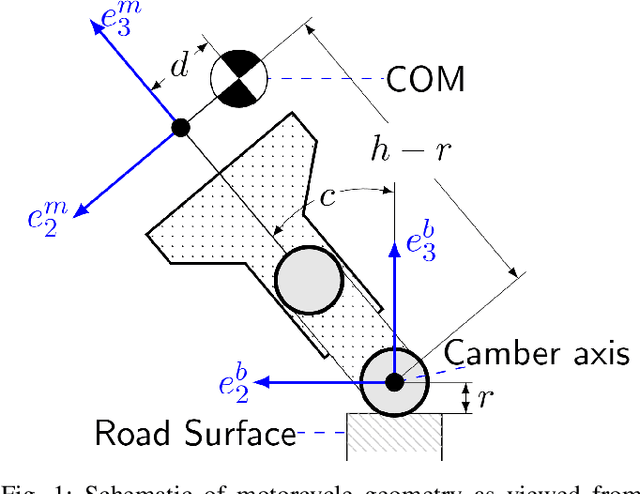
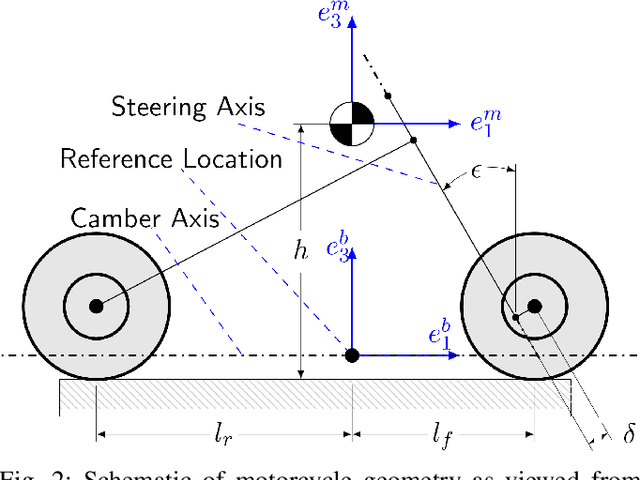
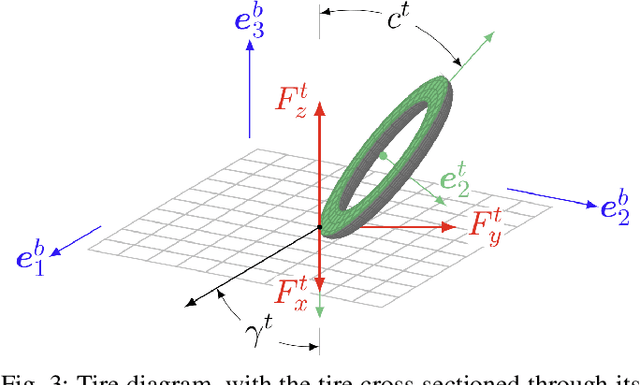
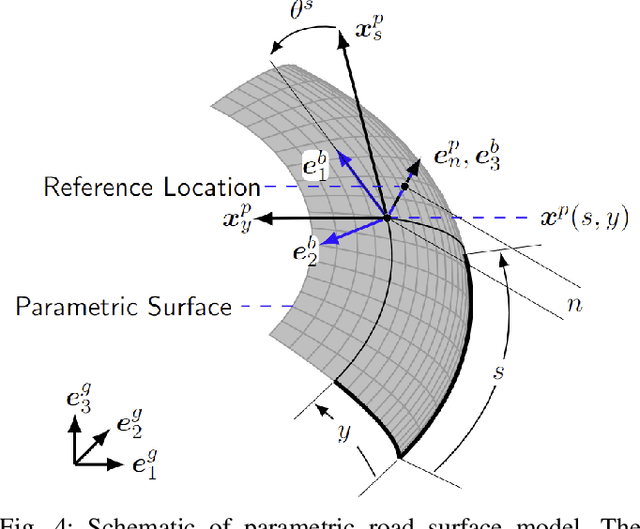
We present a novel control-oriented motorcycle model and use it for computing racing lines on a nonplanar racetrack. The proposed model combines recent advances in nonplanar road models with the dynamics of motorcycles. Our approach considers the additional camber degree of freedom of the motorcycle body with a simplified model of the rider and front steering fork bodies. We demonstrate the effectiveness of our model by computing minimum-time racing trajectories on a nonplanar racetrack.
Euclidean and non-Euclidean Trajectory Optimization Approaches for Quadrotor Racing
Sep 13, 2023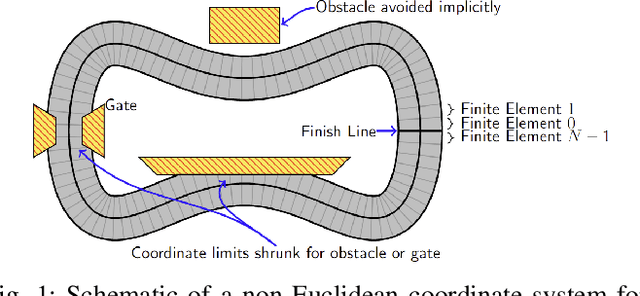
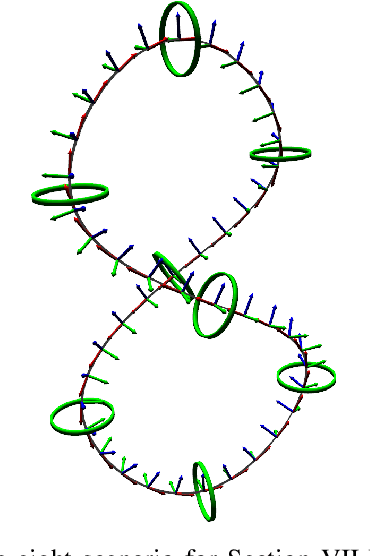
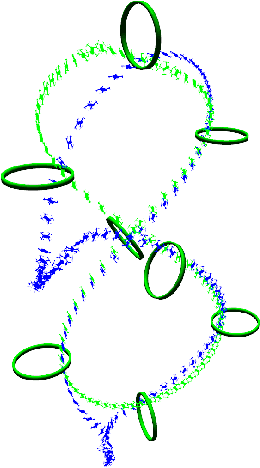
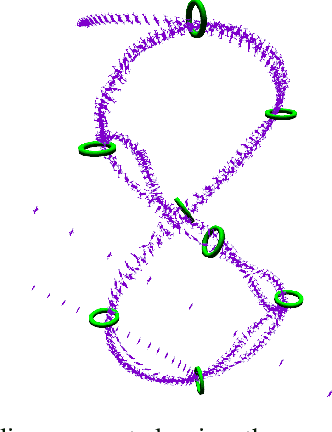
We present two approaches to compute raceline trajectories for quadrotors by solving an optimal control problem. The approaches involve expressing quadrotor pose in either a Euclidean or non-Euclidean frame of reference and are both based on collocation. The compute times of both approaches are over 100x faster than published methods. Additionally, both approaches compute trajectories with faster lap time and show improved numerical convergence. In the last part of the paper we devise a novel method to compute racelines in dense obstacle fields using the non-Euclidean approach.