 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Variational principle for dynamic Self Organizing Maps
Aug 24, 2022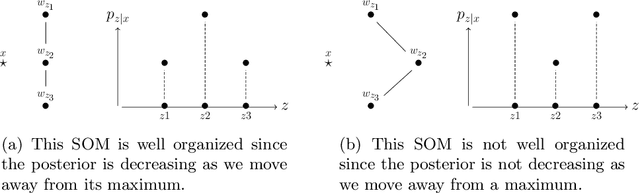
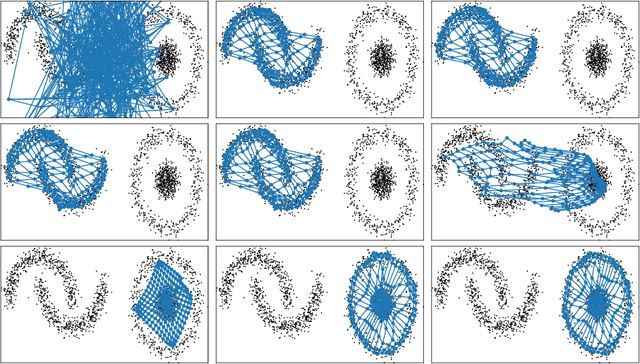
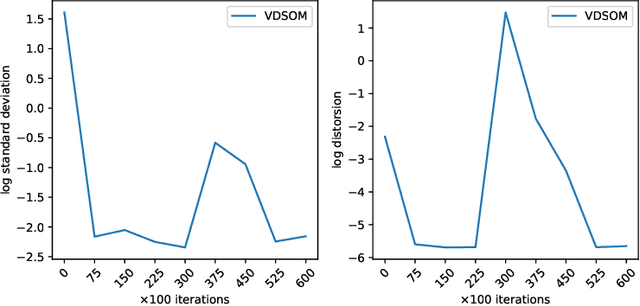
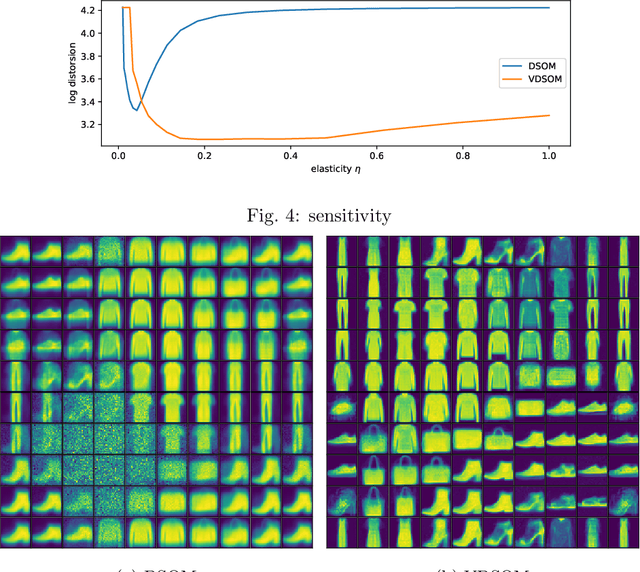
We propose organisation conditions that yield a method for training SOM with adaptative neighborhood radius in a variational Bayesian framework. This method is validated on a non-stationary setting and compared in an high-dimensional setting with an other adaptative method.
A unified view on Self-Organizing Maps and Stochastic Neighbor Embedding
May 03, 2022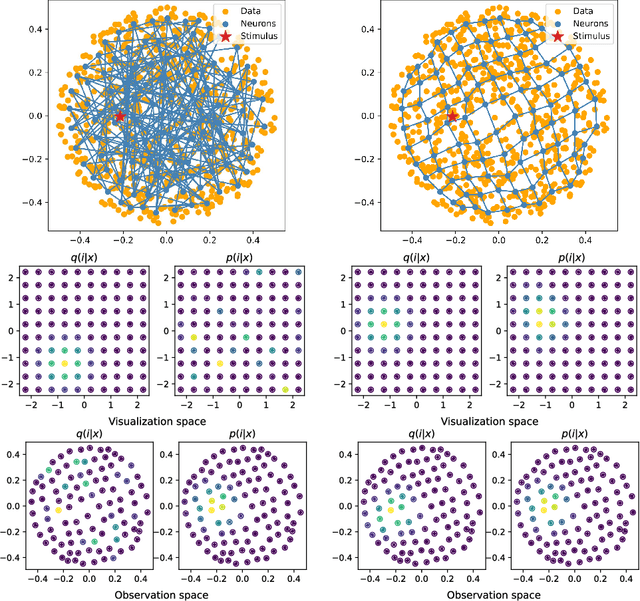
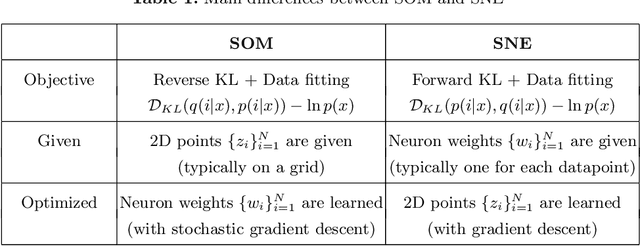
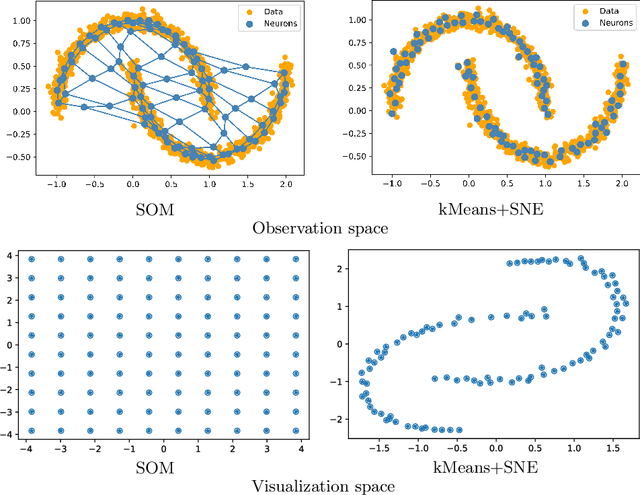
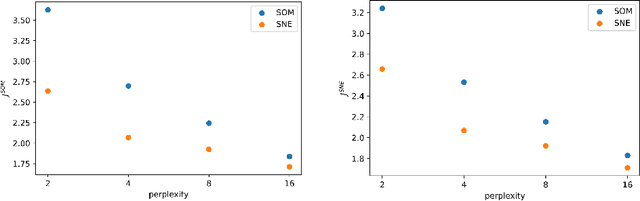
We propose a unified view on two widely used data visualization techniques: Self-Organizing Maps (SOMs) and Stochastic Neighbor Embedding (SNE). We show that they can both be derived from a common mathematical framework. Leveraging this formulation, we propose to compare SOM and SNE quantitatively on two datasets, and discuss possible avenues for future work to take advantage of both approaches.
Representation Learning in Partially Observable Environments using Sensorimotor Prediction
Apr 26, 2018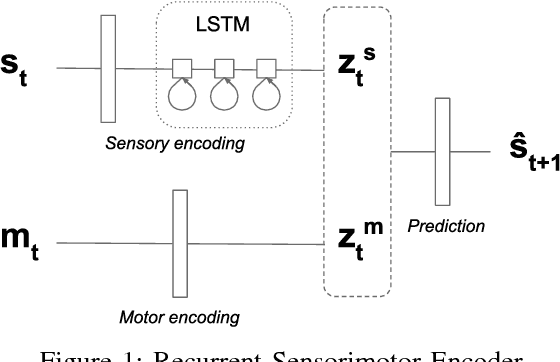

In order to explore and act autonomously in an environment, an agent needs to learn from the sensorimotor information that is captured while acting. By extracting the regularities in this sensorimotor stream, it can learn a model of the world, which in turn can be used as a basis for action and exploration. This requires the acquisition of compact representations from a possibly high dimensional raw observation, which is noisy and ambiguous. In this paper, we learn sensory representations from sensorimotor prediction. We propose a model which integrates sensorimotor information over time, and project it in a sensory representation which is useful for prediction. We emphasize on a simple example the role of motor and memory for learning sensory representations.