 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad obstacles positional and dynamic features extraction combining object detection, stereo disparity maps and optical flow data
Jun 24, 2020
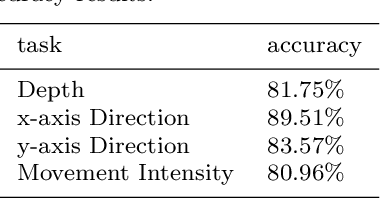


One of the most relevant tasks in an intelligent vehicle navigation system is the detection of obstacles. It is important that a visual perception system for navigation purposes identifies obstacles, and it is also important that this system can extract essential information that may influence the vehicle's behavior, whether it will be generating an alert for a human driver or guide an autonomous vehicle in order to be able to make its driving decisions. In this paper we present an approach for the identification of obstacles and extraction of class, position, depth and motion information from these objects that employs data gained exclusively from passive vision. We performed our experiments on two different data-sets and the results obtained shown a good efficacy from the use of depth and motion patterns to assess the obstacles' potential threat status.
Road surface detection and differentiation considering surface damages
Jun 23, 2020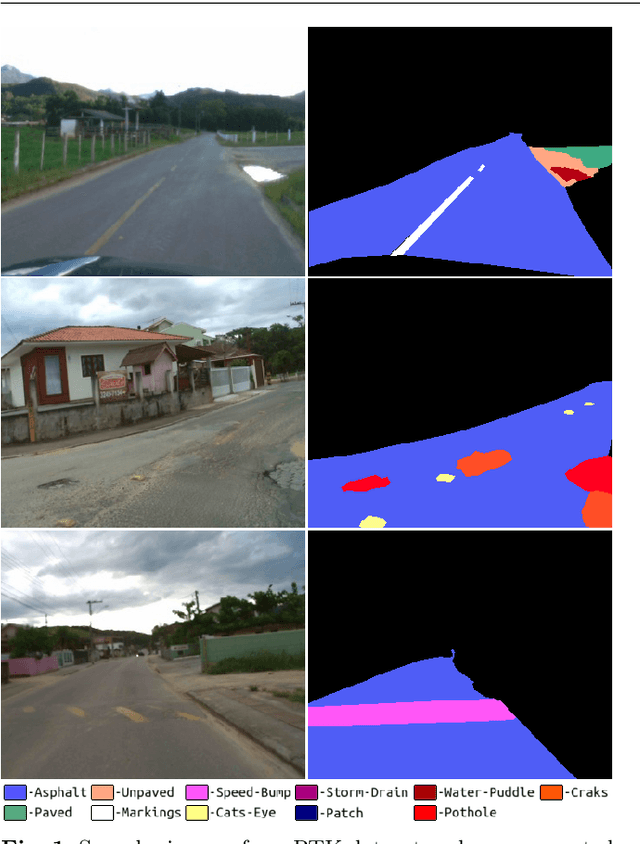



A challenge still to be overcome in the field of visual perception for vehicle and robotic navigation on heavily damaged and unpaved roads is the task of reliable path and obstacle detection. The vast majority of the researches have as scenario roads in good condition, from developed countries. These works cope with few situations of variation on the road surface and even fewer situations presenting surface damages. In this paper we present an approach for road detection considering variation in surface types, identifying paved and unpaved surfaces and also detecting damage and other information on other road surface that may be relevant to driving safety. We also present a new Ground Truth with image segmentation, used in our approach and that allowed us to evaluate our results. Our results show that it is possible to use passive vision for these purposes, even using images captured with low cost cameras.