 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Performance Across Two Atari Paddle Games Using the Same Perceptual Control Architecture Without Training
Aug 04, 2021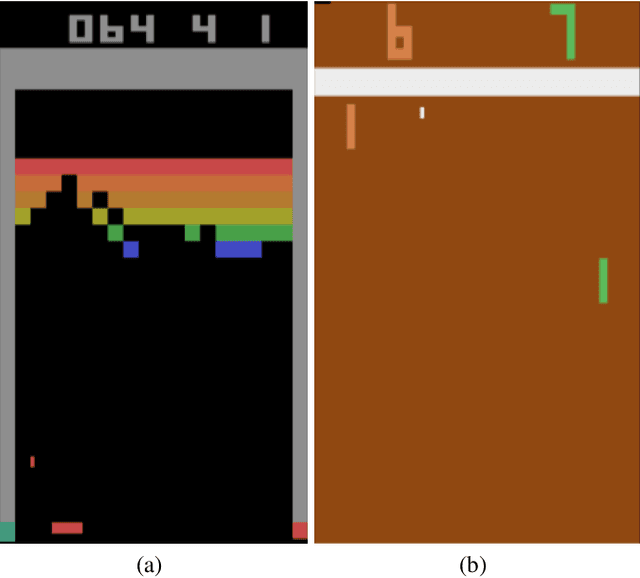
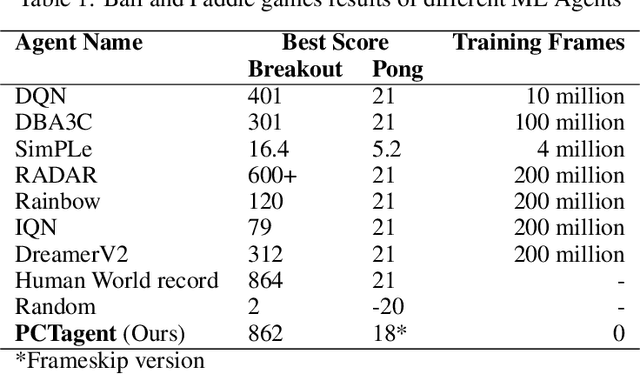

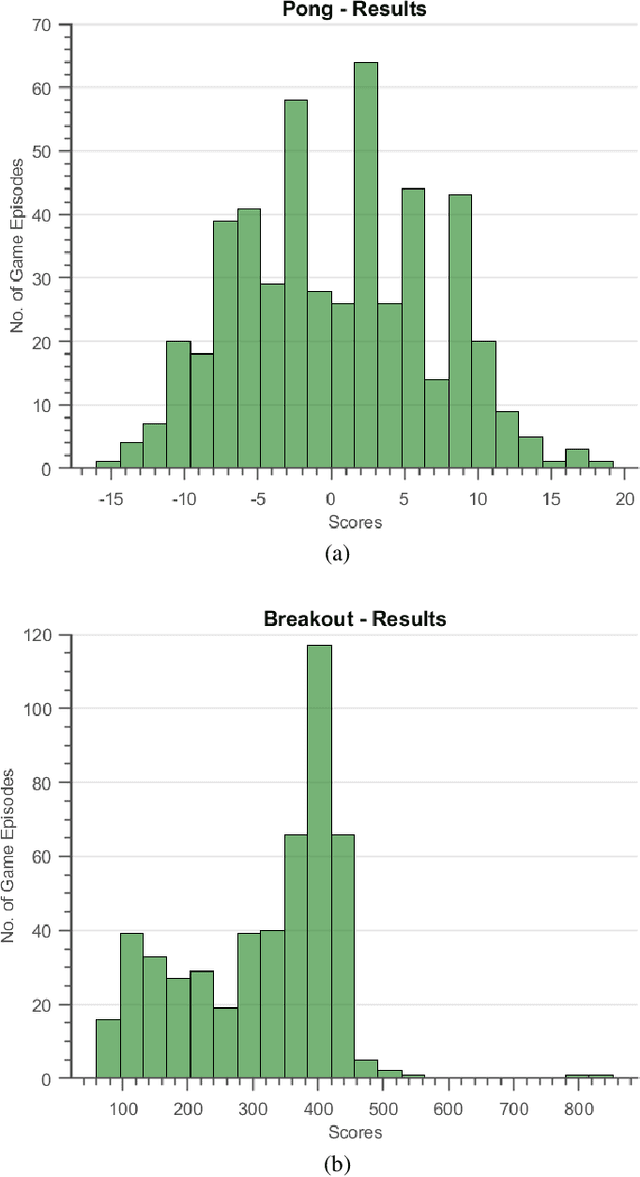
Deep reinforcement learning (DRL) requires large samples and a long training time to operate optimally. Yet humans rarely require long periods training to perform well on novel tasks, such as computer games, once they are provided with an accurate program of instructions. We used perceptual control theory (PCT) to construct a simple closed-loop model which requires no training samples and training time within a video game study using the Arcade Learning Environment (ALE). The model was programmed to parse inputs from the environment into hierarchically organised perceptual signals, and it computed a dynamic error signal by subtracting the incoming signal for each perceptual variable from a reference signal to drive output signals to reduce this error. We tested the same model across two different Atari paddle games Breakout and Pong to achieve performance at least as high as DRL paradigms, and close to good human performance. Our study shows that perceptual control models, based on simple assumptions, can perform well without learning. We conclude by specifying a parsimonious role of learning that may be more similar to psychological functioning.
Controlling wheelchairs by body motions: A learning framework for the adaptive remapping of space
Jul 27, 2011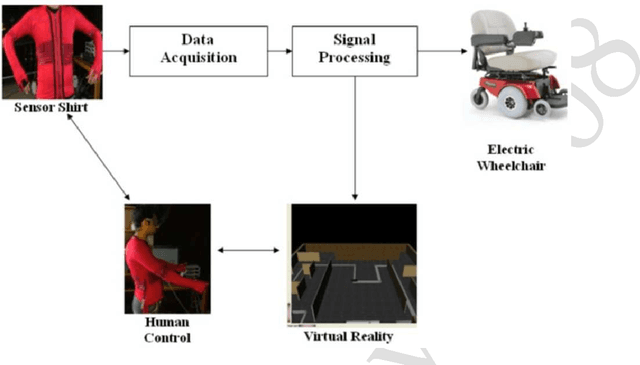
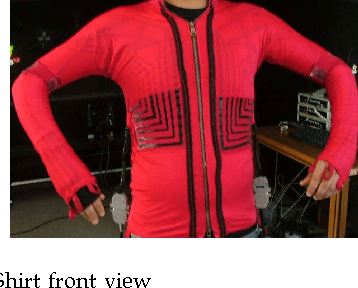


Learning to operate a vehicle is generally accomplished by forming a new cognitive map between the body motions and extrapersonal space. Here, we consider the challenge of remapping movement-to-space representations in survivors of spinal cord injury, for the control of powered wheelchairs. Our goal is to facilitate this remapping by developing interfaces between residual body motions and navigational commands that exploit the degrees of freedom that disabled individuals are most capable to coordinate. We present a new framework for allowing spinal cord injured persons to control powered wheelchairs through signals derived from their residual mobility. The main novelty of this approach lies in substituting the more common joystick controllers of powered wheelchairs with a sensor shirt. This allows the whole upper body of the user to operate as an adaptive joystick. Considerations about learning and risks have lead us to develop a safe testing environment in 3D Virtual Reality. A Personal Augmented Reality Immersive System (PARIS) allows us to analyse learning skills and provide users with an adequate training to control a simulated wheelchair through the signals generated by body motions in a safe environment. We provide a description of the basic theory, of the development phases and of the operation of the complete system. We also present preliminary results illustrating the processing of the data and supporting of the feasibility of this approach.