 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGB-Depth SLAM Review
May 20, 2018
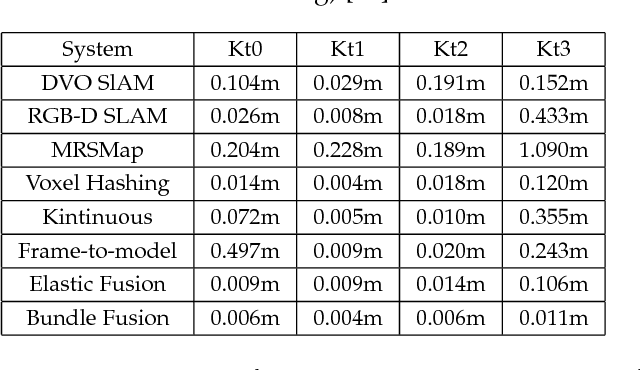
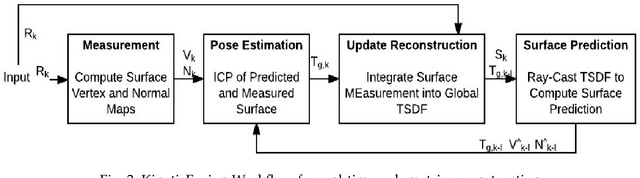
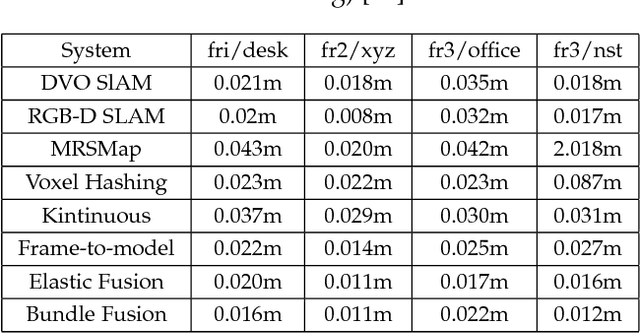
Simultaneous Localization and Mapping (SLAM) have made the real-time dense reconstruction possible increasing the prospects of navigation, tracking, and augmented reality problems. Some breakthroughs have been achieved in this regard during past few decades and more remarkable works are still going on. This paper presents an overview of SLAM approaches that have been developed till now. Kinect Fusion algorithm, its variants, and further developed approaches are discussed in detailed. The algorithms and approaches are compared for their effectiveness in tracking and mapping based on Root Mean Square error over online available datasets.
Artificial Intelligence and its Role in Near Future
Apr 01, 2018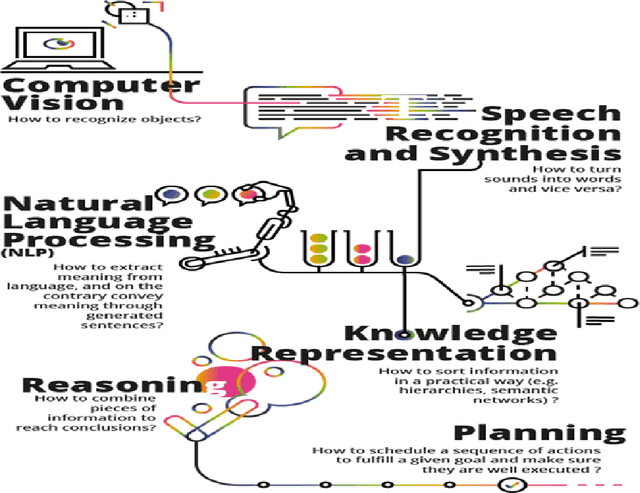
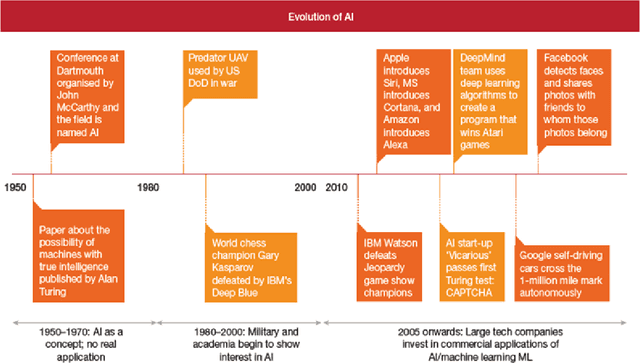
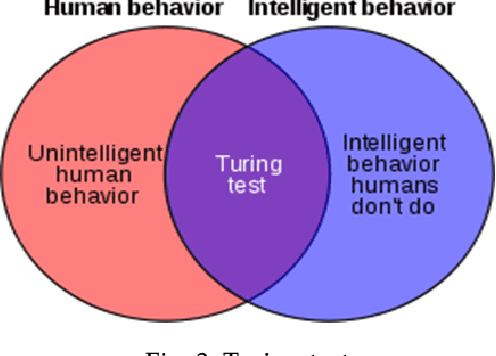
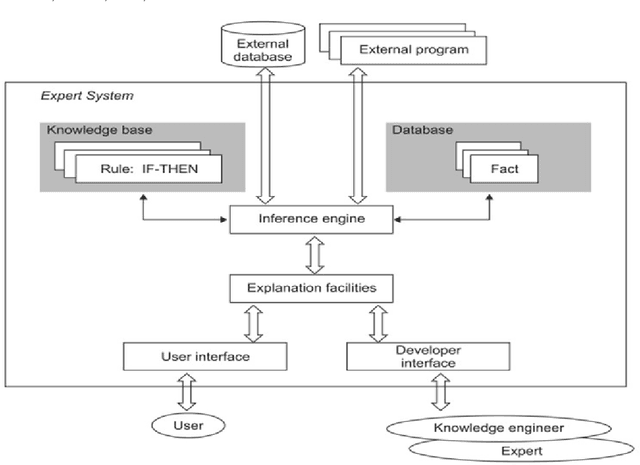
AI technology has a long history which is actively and constantly changing and growing. It focuses on intelligent agents, which contain devices that perceive the environment and based on which takes actions in order to maximize goal success chances. In this paper, we will explain the modern AI basics and various representative applications of AI. In the context of the modern digitalized world, AI is the property of machines, computer programs, and systems to perform the intellectual and creative functions of a person, independently find ways to solve problems, be able to draw conclusions and make decisions. Most artificial intelligence systems have the ability to learn, which allows people to improve their performance over time. The recent research on AI tools, including machine learning, deep learning and predictive analysis intended toward increasing the planning, learning, reasoning, thinking and action taking ability. Based on which, the proposed research intends towards exploring on how the human intelligence differs from the artificial intelligence. Moreover, we critically analyze what AI of today is capable of doing, why it still cannot reach human intelligence and what are the open challenges existing in front of AI to reach and outperform human level of intelligence. Furthermore, it will explore the future predictions for artificial intelligence and based on which potential solution will be recommended to solve it within next decades.
A Survey of Deep Learning Techniques for Mobile Robot Applications
Mar 20, 2018Advancements in deep learning over the years have attracted research into how deep artificial neural networks can be used in robotic systems. This research survey will present a summarization of the current research with a specific focus on the gains and obstacles for deep learning to be applied to mobile robotics.