Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGB-Depth SLAM Review
May 20, 2018
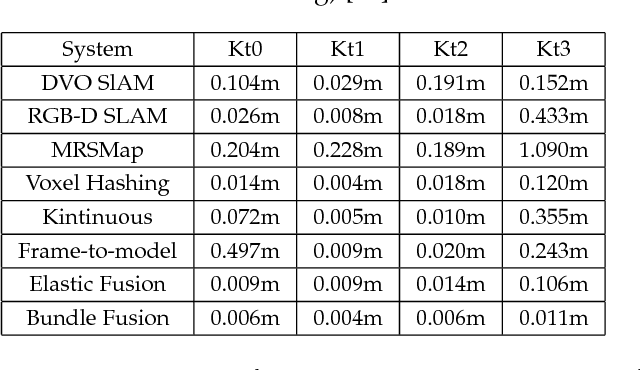
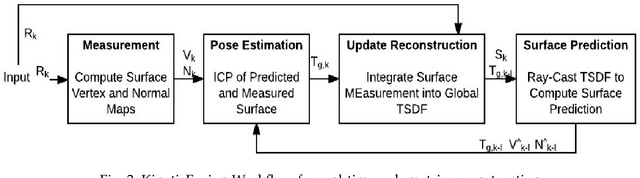
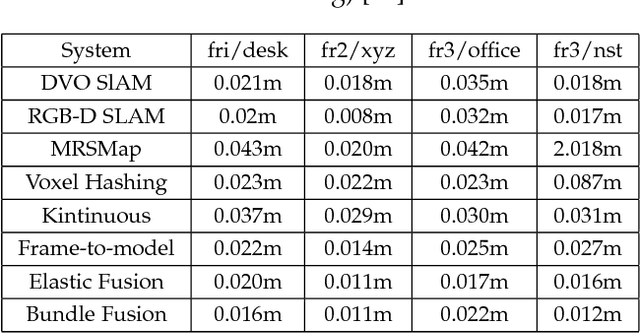
Simultaneous Localization and Mapping (SLAM) have made the real-time dense reconstruction possible increasing the prospects of navigation, tracking, and augmented reality problems. Some breakthroughs have been achieved in this regard during past few decades and more remarkable works are still going on. This paper presents an overview of SLAM approaches that have been developed till now. Kinect Fusion algorithm, its variants, and further developed approaches are discussed in detailed. The algorithms and approaches are compared for their effectiveness in tracking and mapping based on Root Mean Square error over online available datasets.
Via