 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Convolutional Neural Network for the Detection of Polyps in Colonoscopy Images
Aug 15, 2020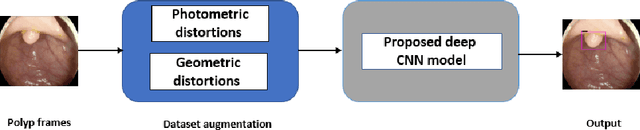
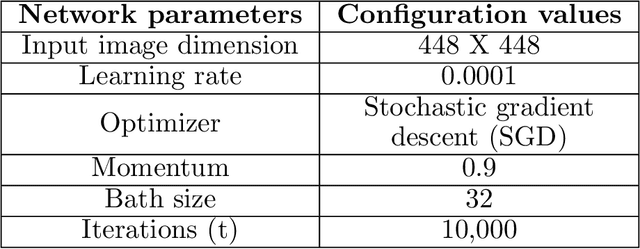
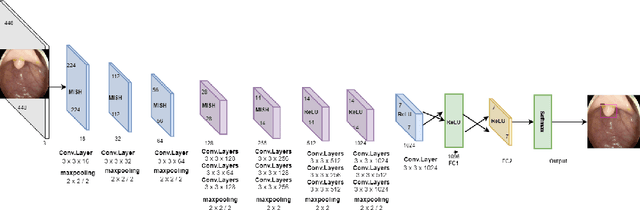
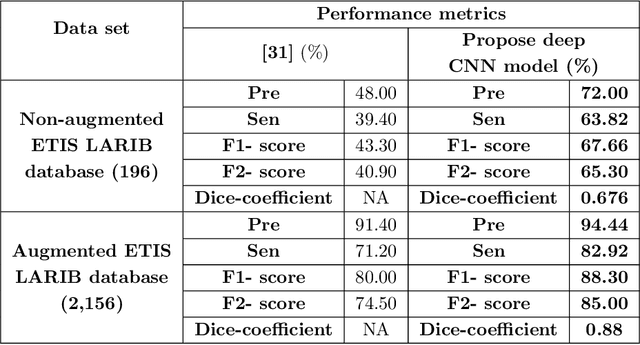
Computerized detection of colonic polyps remains an unsolved issue because of the wide variation in the appearance, texture, color, size, and presence of the multiple polyp-like imitators during colonoscopy. In this paper, we propose a deep convolutional neural network based model for the computerized detection of polyps within colonoscopy images. The proposed model comprises 16 convolutional layers with 2 fully connected layers, and a Softmax layer, where we implement a unique approach using different convolutional kernels within the same hidden layer for deeper feature extraction. We applied two different activation functions, MISH and rectified linear unit activation functions for deeper propagation of information and self regularized smooth non-monotonicity. Furthermore, we used a generalized intersection of union, thus overcoming issues such as scale invariance, rotation, and shape. Data augmentation techniques such as photometric and geometric distortions are adapted to overcome the obstacles faced in polyp detection. Detailed benchmarked results are provided, showing better performance in terms of precision, sensitivity, F1- score, F2- score, and dice-coefficient, thus proving the efficacy of the proposed model.
An Improved Deep Convolutional Neural Network-Based Autonomous Road Inspection Scheme Using Unmanned Aerial Vehicles
Aug 14, 2020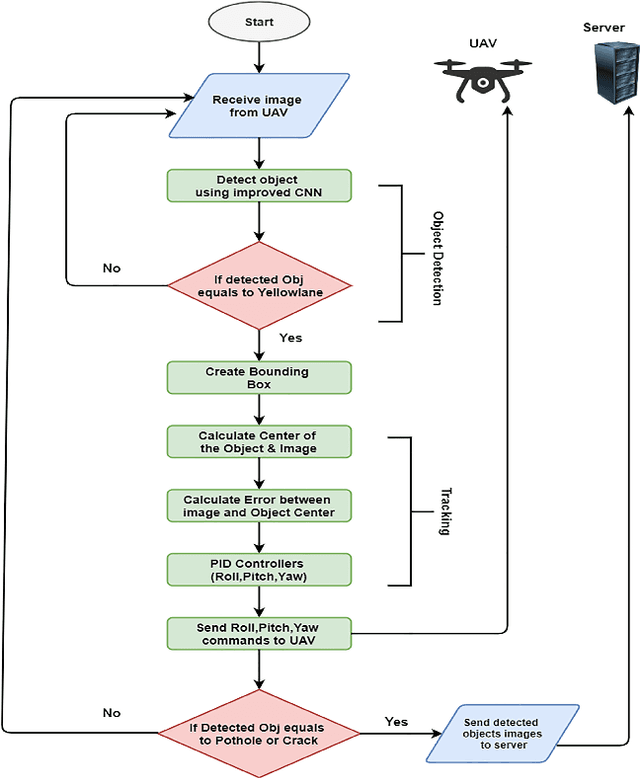
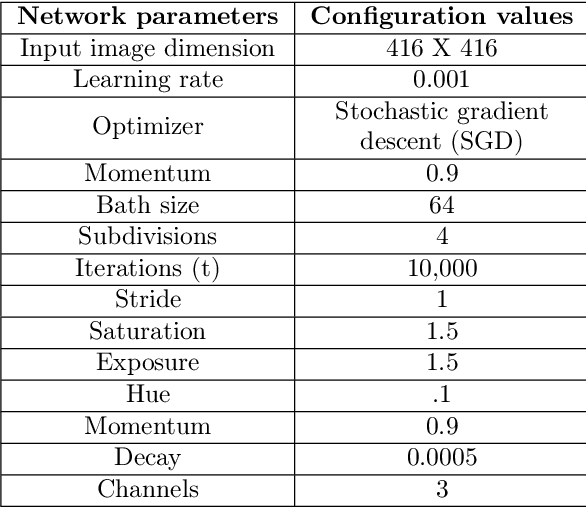
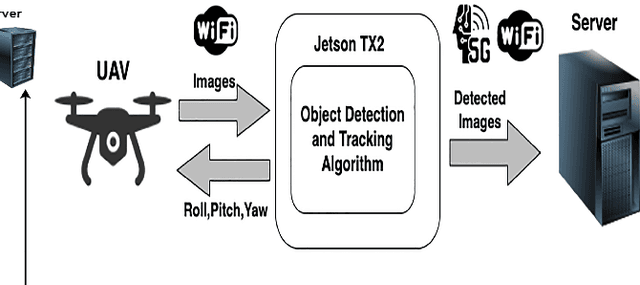
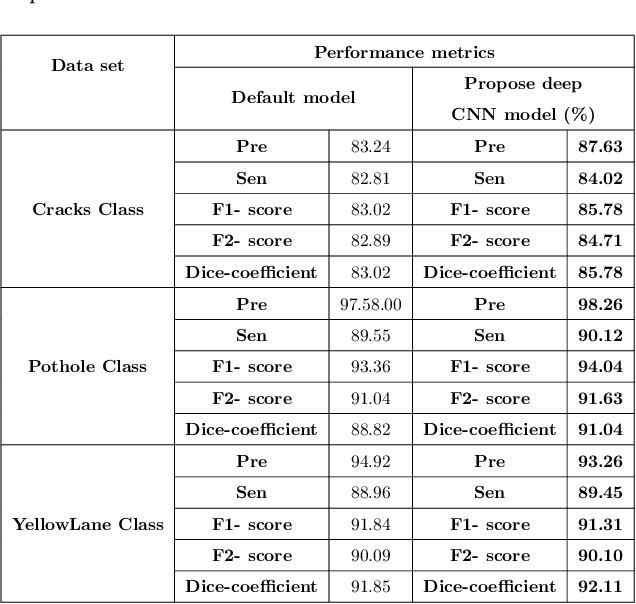
Advancements in artificial intelligence (AI) gives a great opportunity to develop an autonomous devices. The contribution of this work is an improved convolutional neural network (CNN) model and its implementation for the detection of road cracks, potholes, and yellow lane in the road. The purpose of yellow lane detection and tracking is to realize autonomous navigation of unmanned aerial vehicle (UAV) by following yellow lane while detecting and reporting the road cracks and potholes to the server through WIFI or 5G medium. The fabrication of own data set is a hectic and time-consuming task. The data set is created, labeled and trained using default and an improved model. The performance of both these models is benchmarked with respect to accuracy, mean average precision (mAP) and detection time. In the testing phase, it was observed that the performance of the improved model is better in respect of accuracy and mAP. The improved model is implemented in UAV using the robot operating system for the autonomous detection of potholes and cracks in roads via UAV front camera vision in real-time.