 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Trash Detection for Modern Societies using CCTV to Identifying Trash by utilizing Deep Convolutional Neural Network
Sep 21, 2021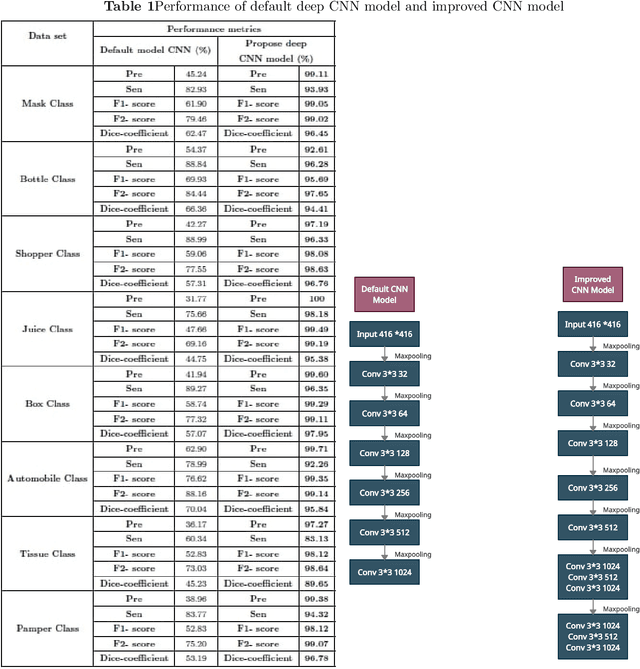
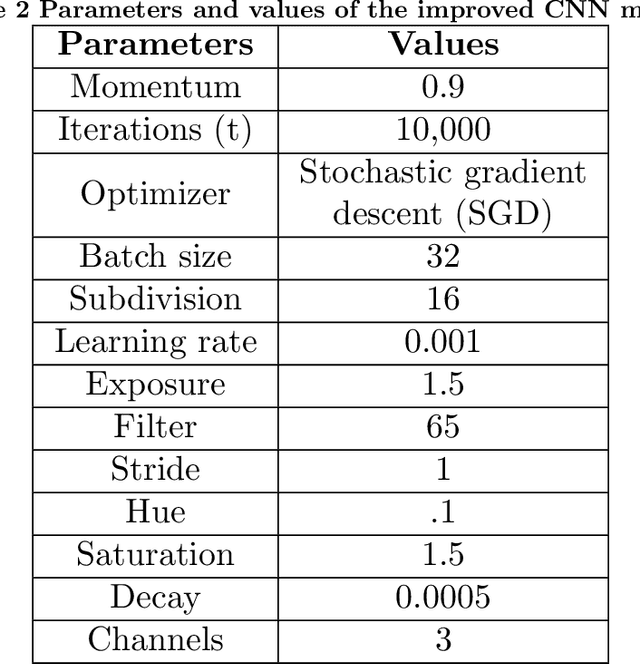
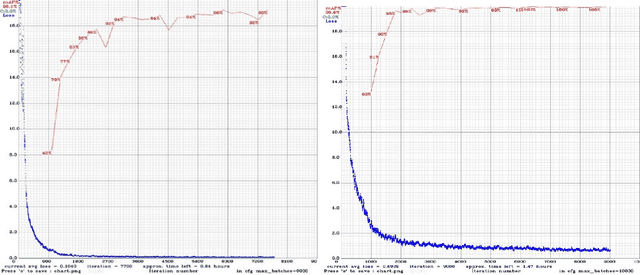
To protect the environment from trash pollution, especially in societies, and to take strict action against the red-handed people who throws the trash. As modern societies are developing and these societies need a modern solution to make the environment clean. Artificial intelligence (AI) evolution, especially in Deep Learning, gives an excellent opportunity to develop real-time trash detection using CCTV cameras. The inclusion of this project is real-time trash detection using a deep model of Convolutional Neural Network (CNN). It is used to obtain eight classes mask, tissue papers, shoppers, boxes, automobile parts, pampers, bottles, and juices boxes. After detecting the trash, the camera records the video of that person for ten seconds who throw trash in society. The challenging part of this paper is preparing a complex custom dataset that took too much time. The dataset consists of more than 2100 images. The CNN model was created, labeled, and trained. The detection time accuracy and average mean precision (mAP) benchmark both models' performance. In experimental phase the mAP performance and accuracy of the improved CNN model was superior in all aspects. The model is used on a CCTV camera to detect trash in real-time.
Performance Evaluation of Cooperative NOMA-based Improved Hybrid SWIPT Protocol
Jun 21, 2021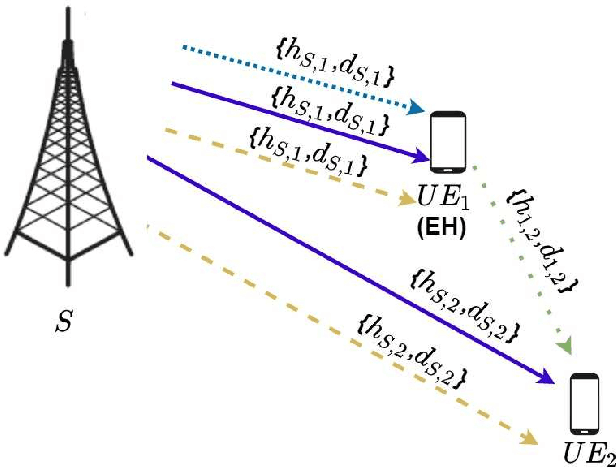
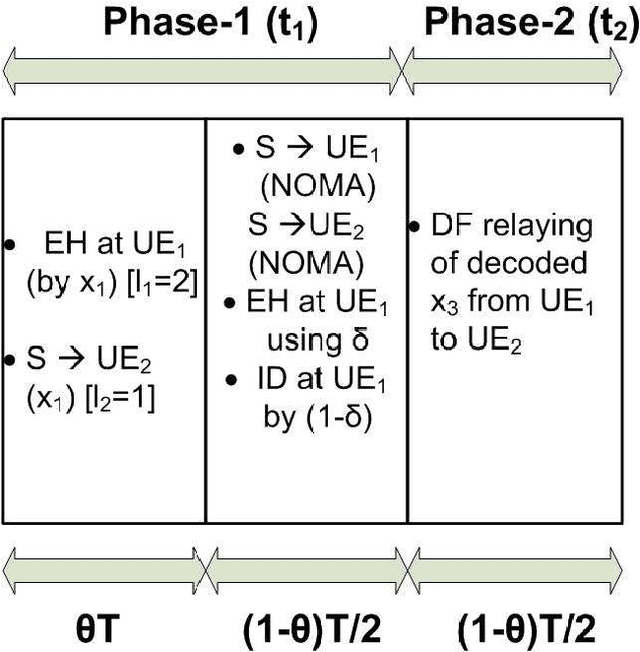
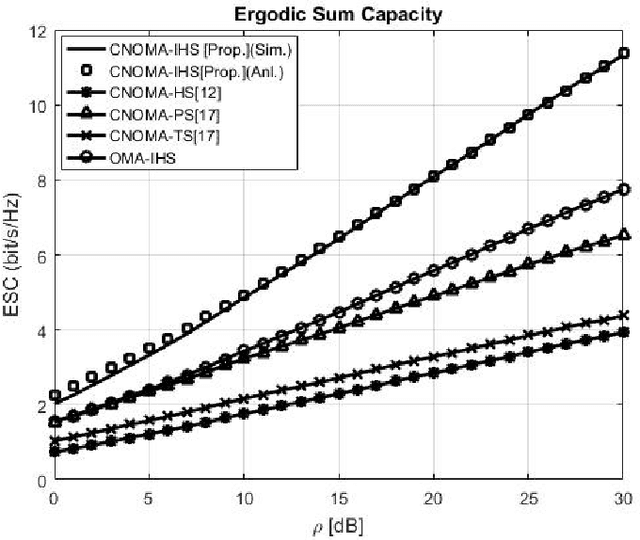
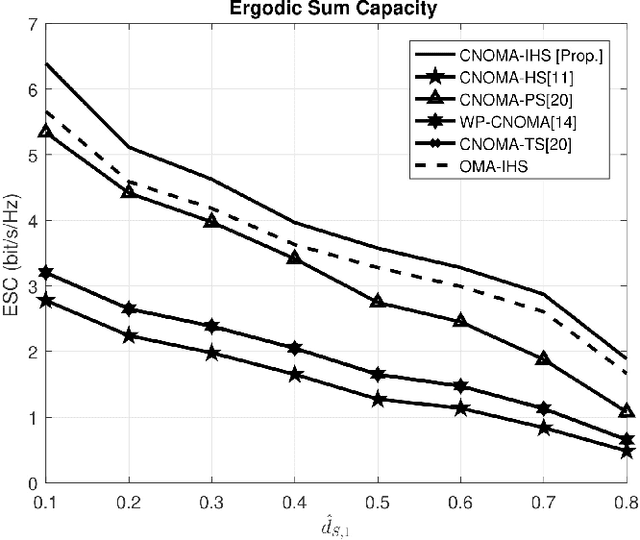
This study proposes the integration of a cooperative non-orthogonal multiple access (CNOMA) and improved hybrid simultaneous wireless information and power transfer (IHS SWIPT) protocol (termed as CNOMA-IHS) to enhance the spectral efficiency (SE) of a downlink (DL) CNOMA communication system. CNOMA-IHS scheme can enhance the ergodic sum capacity (ESC) and energy efficiency (EE) of DL CNOMA by transferring additional symbols towards the users and energize the relay operation as well without any additional resources (e.g., time slot/frequency/code). The analytical and simulation results indicate that the proposed CNOMA-IHS scheme outperforms other existing SWIPT-based schemes (e.g., CNOMA with hybrid SWIPT, CNOMA with power-splitting SWIPT, wireless-powered CNOMA, CNOMA with time switching SWIPT, and orthogonal multiple access with IHS SWIPT) in terms of the ESC. Moreover, the CNOMA-IHS scheme also enhances EE compared with other conventional TS-SWIPT-based schemes, which is also illustrated by the simulation results. In addition, the proposed CNOMA-IHS scheme with the considered EE optimization technique outplayed the proposed CNOMA-IHS scheme without EE optimization and other existing TS-SWIPT-based schemes in terms of EE.
New Normal: Cooperative Paradigm for Covid-19 Timely Detection and Containment using Internet of Things and Deep Learning
Aug 15, 2020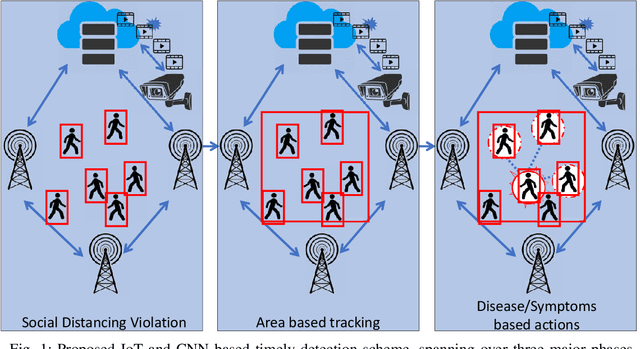
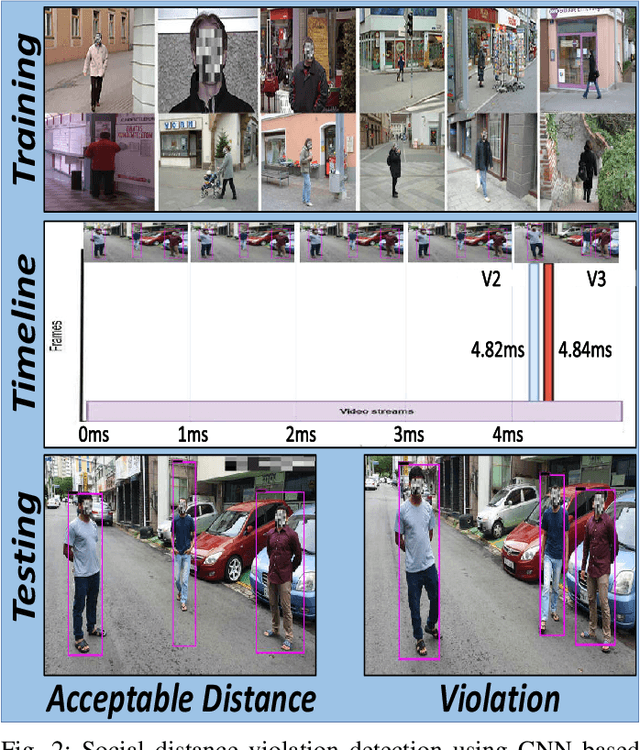
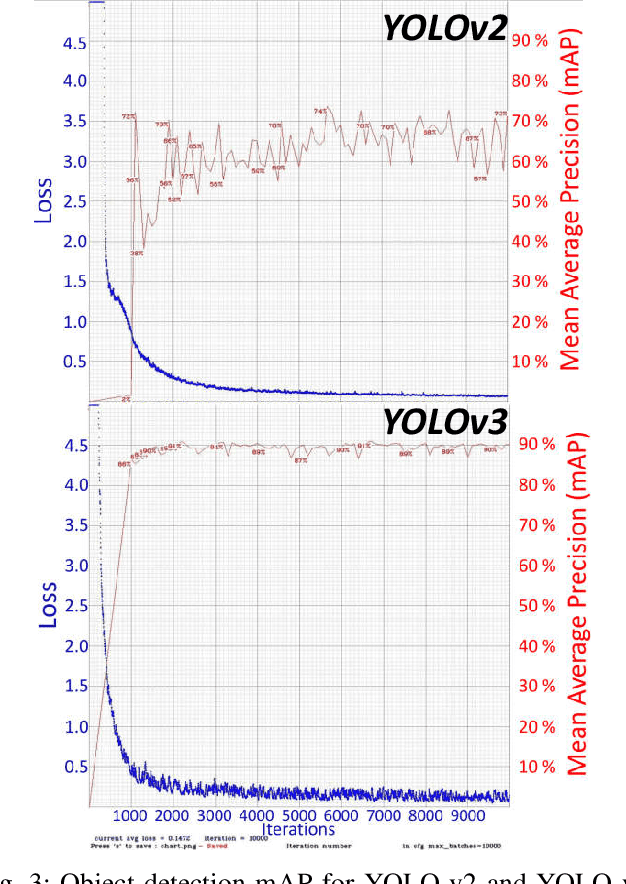
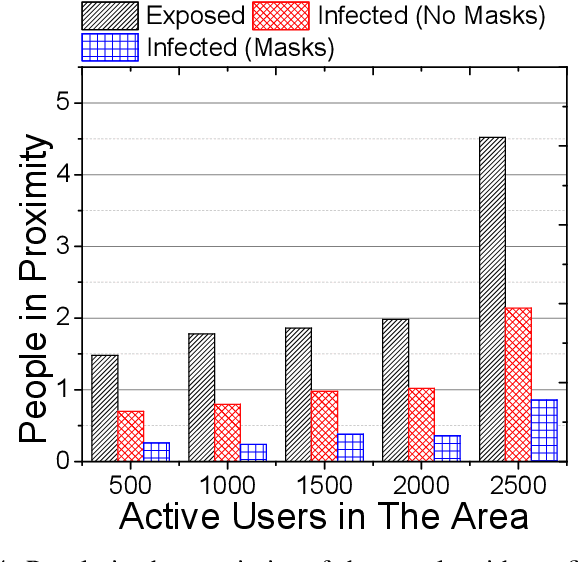
The spread of the novel coronavirus (COVID-19) has caused trillions of dollars in damages to the governments and health authorities by affecting the global economies. The purpose of this study is to introduce a connected smart paradigm that not only detects the possible spread of viruses but also helps to restart businesses/economies, and resume social life. We are proposing a connected Internet of Things ( IoT) based paradigm that makes use of object detection based on convolution neural networks (CNN), smart wearable and connected e-health to avoid current and future outbreaks. First, connected surveillance cameras feed continuous video stream to the server where we detect the inter-object distance to identify any social distancing violations. A violation activates area-based monitoring of active smartphone users and their current state of illness. In case a confirmed patient or a person with high symptoms is present, the system tracks exposed and infected people and appropriate measures are put into actions. We evaluated the proposed scheme for social distancing violation detection using YOLO (you only look once) v2 and v3, and for infection spread tracing using Python simulation.
A Deep Convolutional Neural Network for the Detection of Polyps in Colonoscopy Images
Aug 15, 2020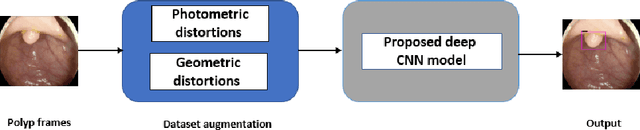
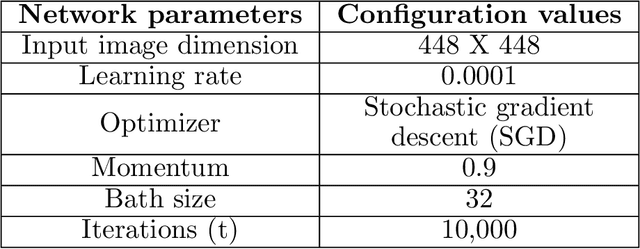
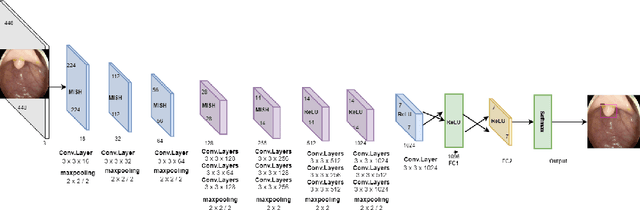
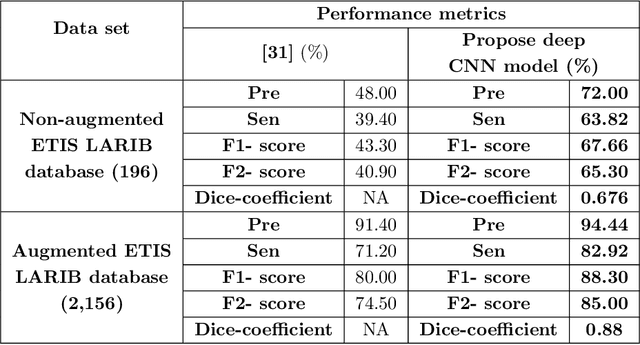
Computerized detection of colonic polyps remains an unsolved issue because of the wide variation in the appearance, texture, color, size, and presence of the multiple polyp-like imitators during colonoscopy. In this paper, we propose a deep convolutional neural network based model for the computerized detection of polyps within colonoscopy images. The proposed model comprises 16 convolutional layers with 2 fully connected layers, and a Softmax layer, where we implement a unique approach using different convolutional kernels within the same hidden layer for deeper feature extraction. We applied two different activation functions, MISH and rectified linear unit activation functions for deeper propagation of information and self regularized smooth non-monotonicity. Furthermore, we used a generalized intersection of union, thus overcoming issues such as scale invariance, rotation, and shape. Data augmentation techniques such as photometric and geometric distortions are adapted to overcome the obstacles faced in polyp detection. Detailed benchmarked results are provided, showing better performance in terms of precision, sensitivity, F1- score, F2- score, and dice-coefficient, thus proving the efficacy of the proposed model.
An Improved Deep Convolutional Neural Network-Based Autonomous Road Inspection Scheme Using Unmanned Aerial Vehicles
Aug 14, 2020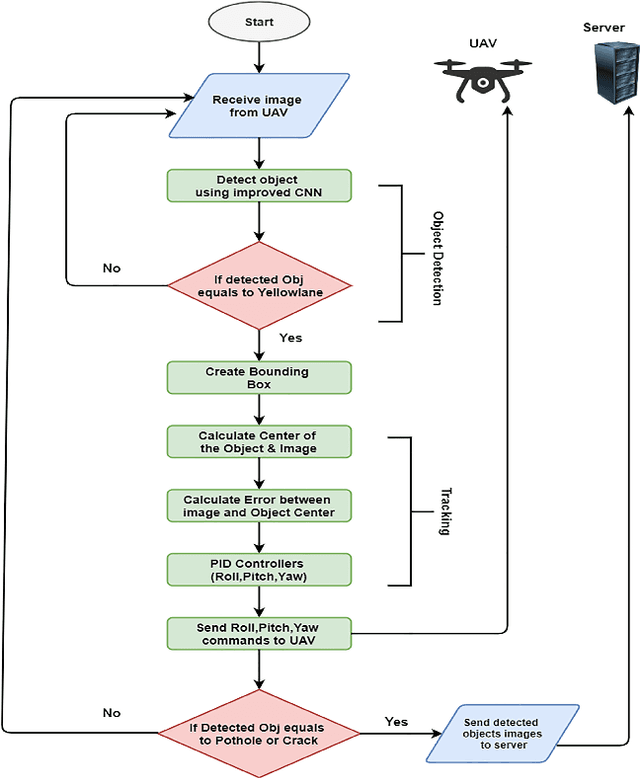
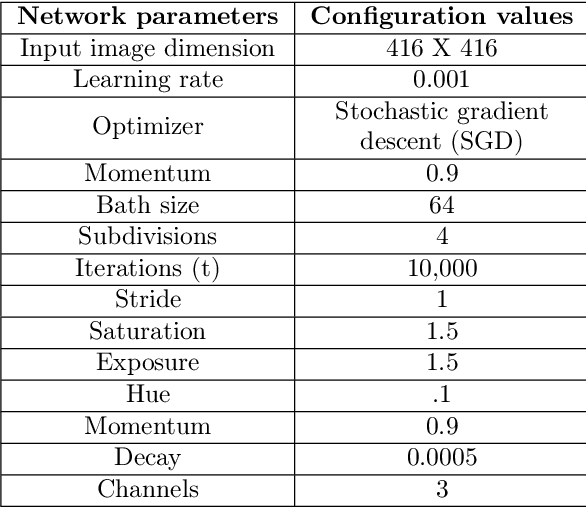
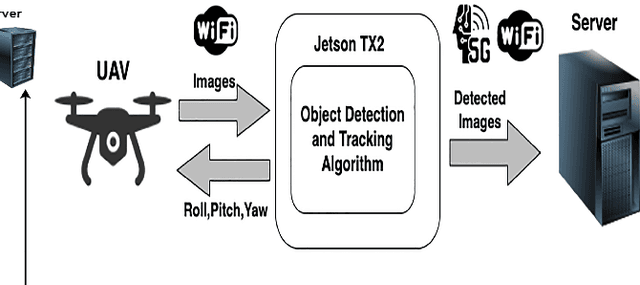
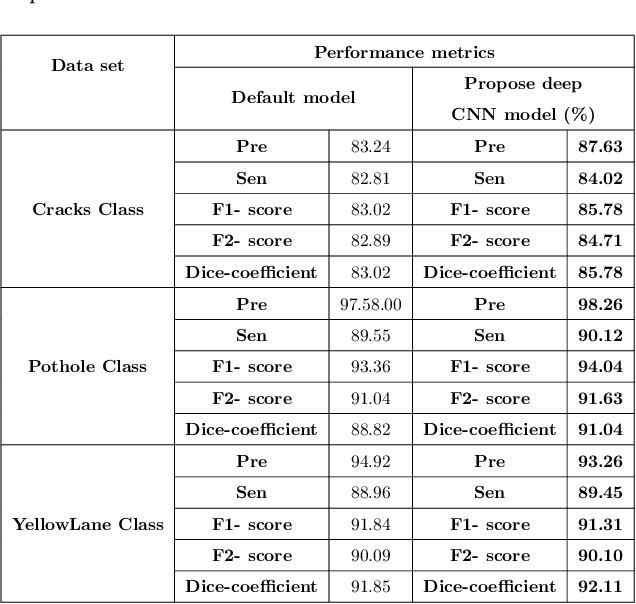
Advancements in artificial intelligence (AI) gives a great opportunity to develop an autonomous devices. The contribution of this work is an improved convolutional neural network (CNN) model and its implementation for the detection of road cracks, potholes, and yellow lane in the road. The purpose of yellow lane detection and tracking is to realize autonomous navigation of unmanned aerial vehicle (UAV) by following yellow lane while detecting and reporting the road cracks and potholes to the server through WIFI or 5G medium. The fabrication of own data set is a hectic and time-consuming task. The data set is created, labeled and trained using default and an improved model. The performance of both these models is benchmarked with respect to accuracy, mean average precision (mAP) and detection time. In the testing phase, it was observed that the performance of the improved model is better in respect of accuracy and mAP. The improved model is implemented in UAV using the robot operating system for the autonomous detection of potholes and cracks in roads via UAV front camera vision in real-time.