 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow-Lenia.png: Evolving Multi-Scale Complexity by Means of Compression
Aug 08, 2024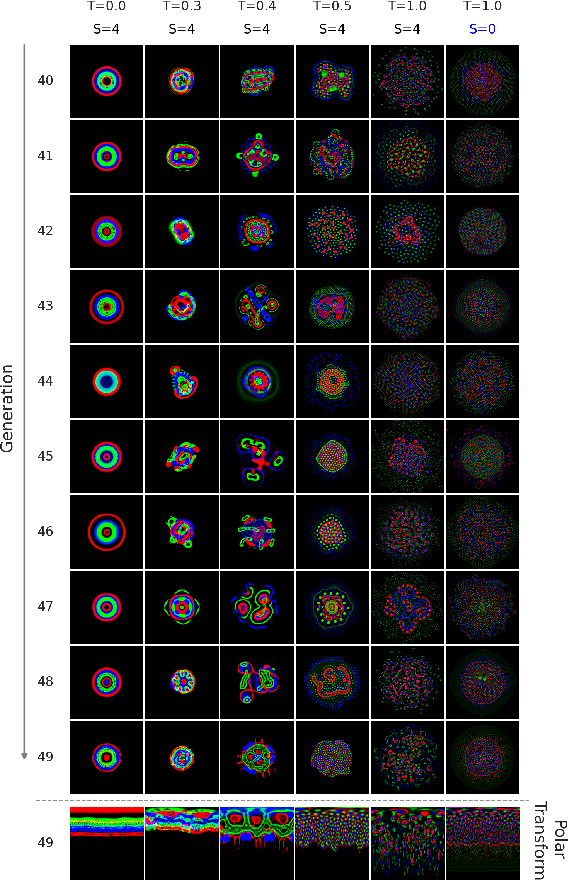

We propose a fitness measure quantifying multi-scale complexity for cellular automaton states, using compressibility as a proxy for complexity. The use of compressibility is grounded in the concept of Kolmogorov complexity, which defines the complexity of an object by the size of its smallest representation. With this fitness function, we explore the complexity range accessible to the well-known Flow Lenia cellular automaton, using image compression algorithms to assess state compressibility. Using a Genetic Algorithm to evolve Flow Lenia patterns, we conduct experiments with two primary objectives: 1) generating patterns of specific complexity levels, and 2) exploring the extrema of Flow Lenia's complexity domain. Evolved patterns reflect the complexity targets, with higher complexity targets yielding more intricate patterns, consistent with human perceptions of complexity. This demonstrates that our fitness function can effectively evolve patterns that match specific complexity objectives within the bounds of the complexity range accessible to Flow Lenia under a given hyperparameter configuration.
Recognising Affordances in Predicted Futures to Plan with Consideration of Non-canonical Affordance Effects
Jun 22, 2022



We propose a novel system for action sequence planning based on a combination of affordance recognition and a neural forward model predicting the effects of affordance execution. By performing affordance recognition on predicted futures, we avoid reliance on explicit affordance effect definitions for multi-step planning. Because the system learns affordance effects from experience data, the system can foresee not just the canonical effects of an affordance, but also situation-specific side-effects. This allows the system to avoid planning failures due to such non-canonical effects, and makes it possible to exploit non-canonical effects for realising a given goal. We evaluate the system in simulation, on a set of test tasks that require consideration of canonical and non-canonical affordance effects.