Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Detection through Supervised Classification
May 10, 2016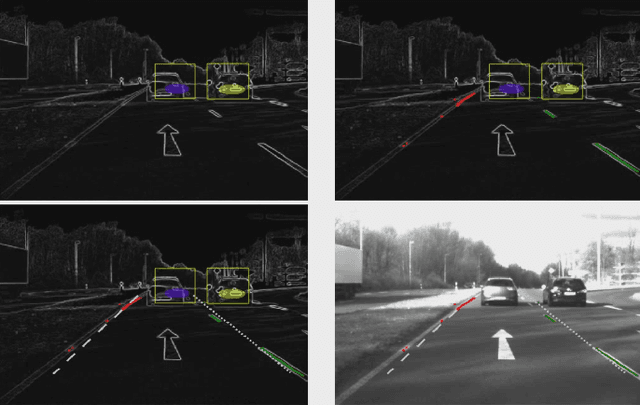

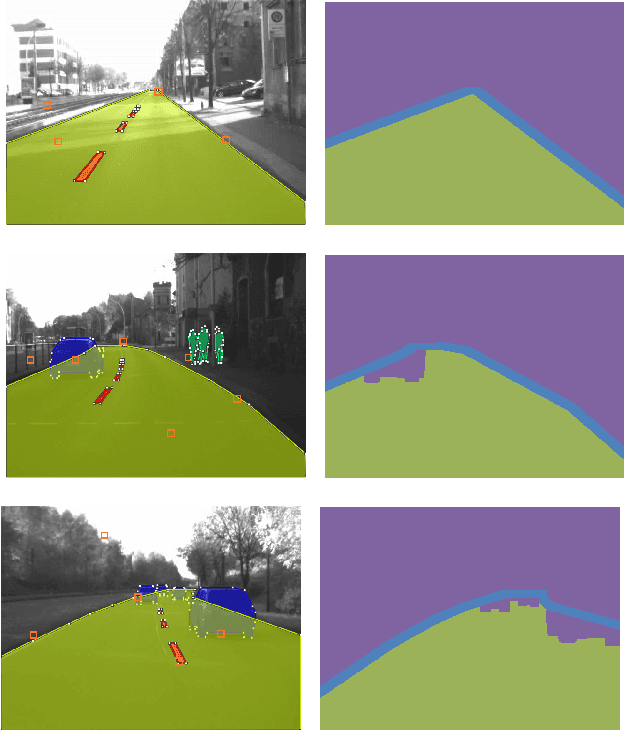

Autonomous driving is a rapidly evolving technology. Autonomous vehicles are capable of sensing their environment and navigating without human input through sensory information such as radar, lidar, GNSS, vehicle odometry, and computer vision. This sensory input provides a rich dataset that can be used in combination with machine learning models to tackle multiple problems in supervised settings. In this paper we focus on road detection through gray-scale images as the sole sensory input. Our contributions are twofold: first, we introduce an annotated dataset of urban roads for machine learning tasks; second, we introduce a road detection framework on this dataset through supervised classification and hand-crafted feature vectors.
Via