 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvably Safe Tolerance Estimation for Robot Arms via Sum-of-Squares Programming
Apr 18, 2021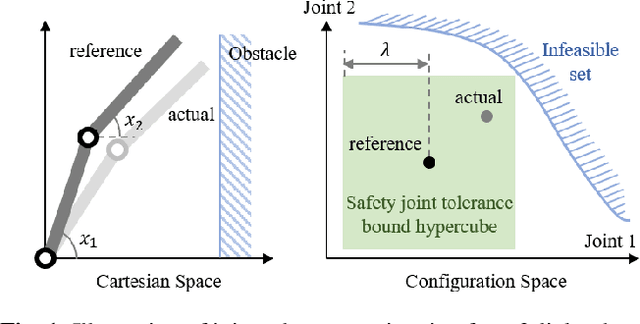
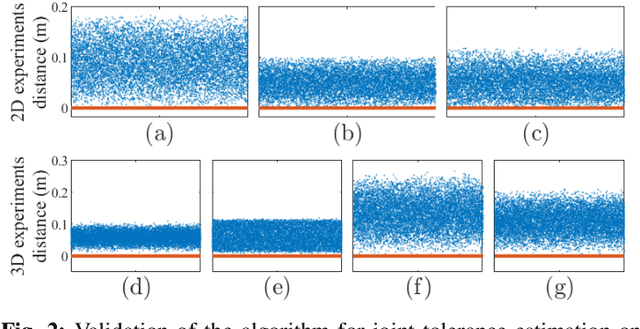
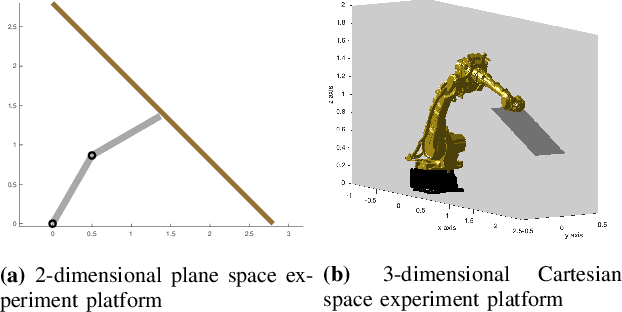

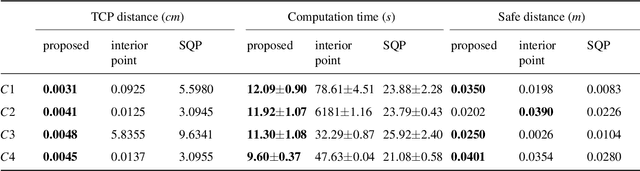
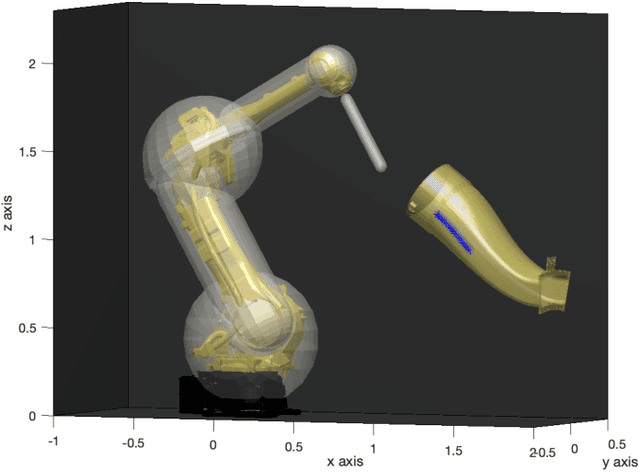
Tolerance estimation problems are prevailing in engineering applications. For example, in modern robotics, it remains challenging to efficiently estimate joint tolerance, \ie the maximal allowable deviation from a reference robot state such that safety constraints are still satisfied. This paper presented an efficient algorithm to estimate the joint tolerance using sum-of-squares programming. It is theoretically proved that the algorithm provides a tight lower bound of the joint tolerance. Extensive numerical studies demonstrate that the proposed method is computationally efficient and near optimal. The algorithm is implemented in the JTE toolbox and is available at \url{https://github.com/intelligent-control-lab/Sum-of-Square-Safety-Optimization}.
Contact-Rich Trajectory Generation in Confined Environments Using Iterative Convex Optimization
Aug 09, 2020

Applying intelligent robot arms in dynamic uncertain environments (i.e., flexible production lines) remains challenging, which requires efficient algorithms for real time trajectory generation. The motion planning problem for robot trajectory generation is highly nonlinear and nonconvex, which usually comes with collision avoidance constraints, robot kinematics and dynamics constraints, and task constraints (e.g., following a Cartesian trajectory defined on a surface and maintain the contact). The nonlinear and nonconvex planning problem is computationally expensive to solve, which limits the application of robot arms in the real world. In this paper, for redundant robot arm planning problems with complex constraints, we present a motion planning method using iterative convex optimization that can efficiently handle the constraints and generate optimal trajectories in real time. The proposed planner guarantees the satisfaction of the contact-rich task constraints and avoids collision in confined environments. Extensive experiments on trajectory generation for weld grinding are performed to demonstrate the effectiveness of the proposed method and its applicability in advanced robotic manufacturing.