 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJuncNet: A Deep Neural Network for Road Junction Disambiguation for Autonomous Vehicles
Aug 31, 2018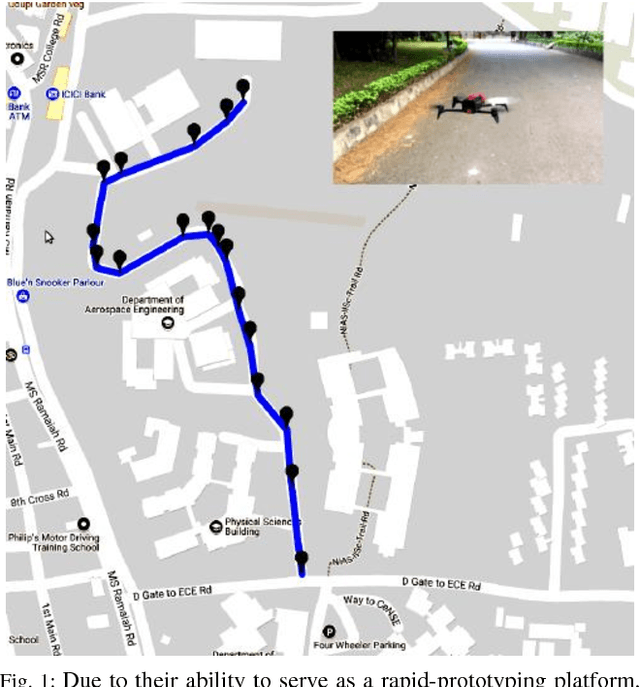
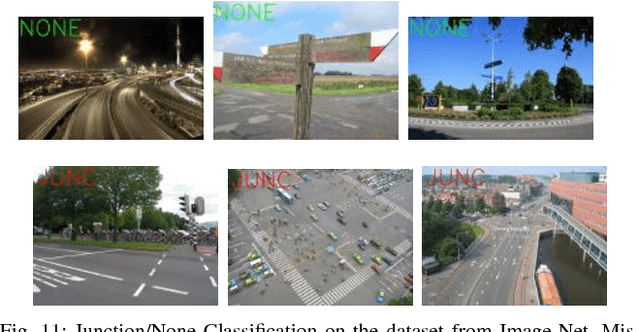
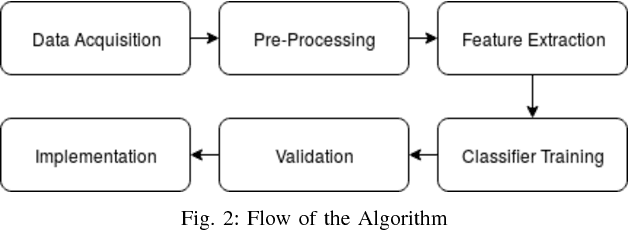

With a great amount of research going on in the field of autonomous vehicles or self-driving cars, there has been considerable progress in road detection and tracking algorithms. Most of these algorithms use GPS to handle road junctions and its subsequent decisions. However, there are places in the urban environment where it becomes difficult to get GPS fixes which render the junction decision handling erroneous or possibly risky. Vision-based junction detection, however, does not have such problems. This paper proposes a novel deep convolutional neural network architecture for disambiguation of junctions from roads with a high degree of accuracy. This network is benchmarked against other well known classifying network architectures like AlexNet and VGGnet. Further, we discuss a potential road navigation methodology which uses the proposed network model. We conclude by performing an experimental validation of the trained network and the navigational method on the roads of the Indian Institute of Science (IISc).