 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep-Learning Framework to Predict the Dynamics of a Human-Driven Vehicle Based on the Road Geometry
Mar 05, 2021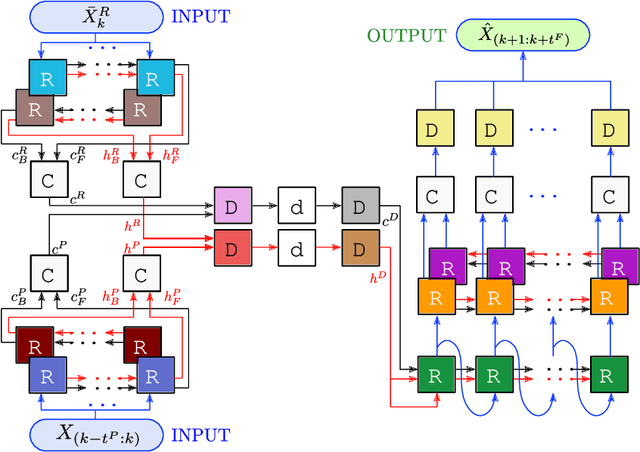
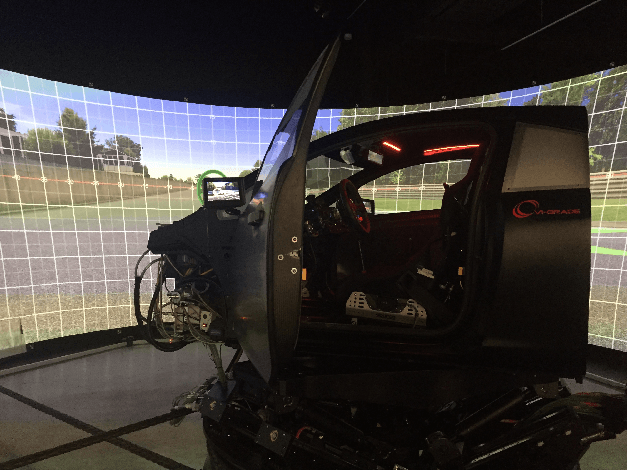
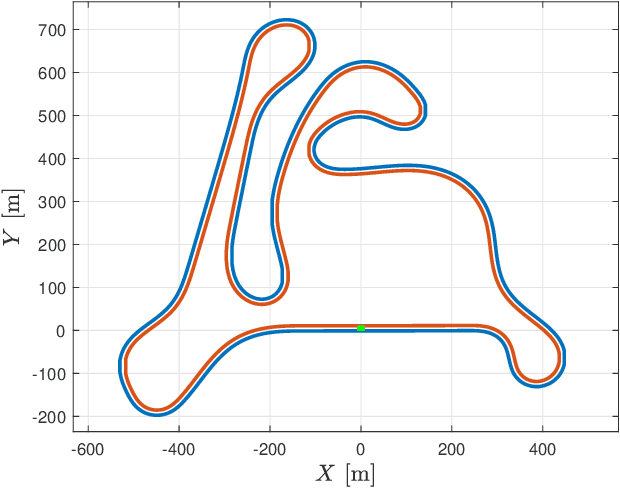
Many trajectory forecasting methods, implementing deterministic and stochastic models, have been presented in the last decade for automotive applications. In this work, a deep-learning framework is proposed to model and predict the evolution of the coupled driver-vehicle system dynamics. Particularly, we aim to describe how the road geometry affects the actions performed by the driver. Differently from other works, the problem is formulated in such a way that the user may specify the features of interest. Nonetheless, we propose a set of features that is commonly used for automotive control applications to practically show the functioning of the algorithm. To solve the prediction problem, a deep recurrent neural network based on Long Short-Term Memory autoencoders is designed. It fuses the information on the road geometry and the past driver-vehicle system dynamics to produce context-aware predictions. Also, the complexity of the neural network is constrained to favour its use in online control tasks. The efficacy of the proposed approach was verified in a case study centered on motion cueing algorithms, using a dataset collected during test sessions of a non-professional driver on a dynamic driving simulator. A 3D track with complex geometry was employed as driving environment to render the prediction task challenging. Finally, the robustness of the neural network to changes in the driver and track was investigated to set guidelines for future works.