 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeployment of Aerial Robots during the Flood Disaster in Erftstadt / Blessem in July 2021
Sep 07, 2022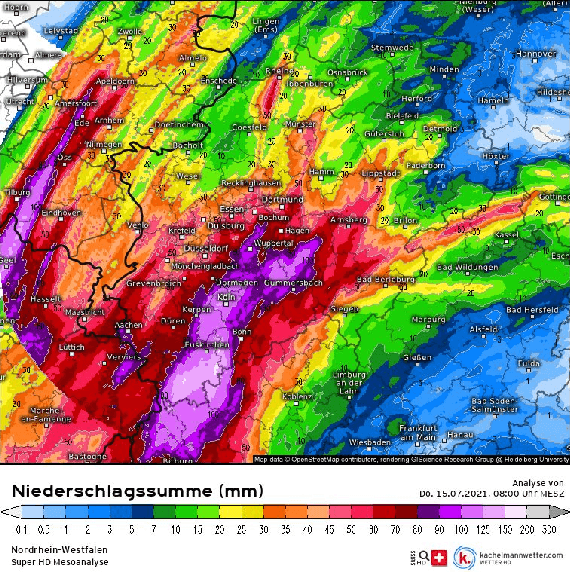



Climate change is leading to more and more extreme weather events such as heavy rainfall and flooding. This technical report deals with the question of how rescue commanders can be better and faster provided with current information during flood disasters using Unmanned Aerial Vehicles (UAVs), i.e. during the flood in July 2021 in Central Europe, more specifically in Erftstadt / Blessem. The UAVs were used for live observation and regular inspections of the flood edge on the one hand, and on the other hand for the systematic data acquisition in order to calculate 3D models using Structure from Motion and MultiView Stereo. The 3D models embedded in a GIS application serve as a planning basis for the systematic exploration and decision support for the deployment of additional smaller UAVs but also rescue forces. The systematic data acquisition of the UAVs by means of autonomous meander flights provides high-resolution images which are computed to a georeferenced 3D model of the surrounding area within 15 minutes in a specially equipped robotic command vehicle (RobLW). From the comparison of high-resolution elevation profiles extracted from the 3D model on successive days, changes in the water level become visible. This information enables the emergency management to plan further inspections of the buildings and to search for missing persons on site.
Deployment of Aerial Robots after a major fire of an industrial hall with hazardous substances, a report
Nov 29, 2021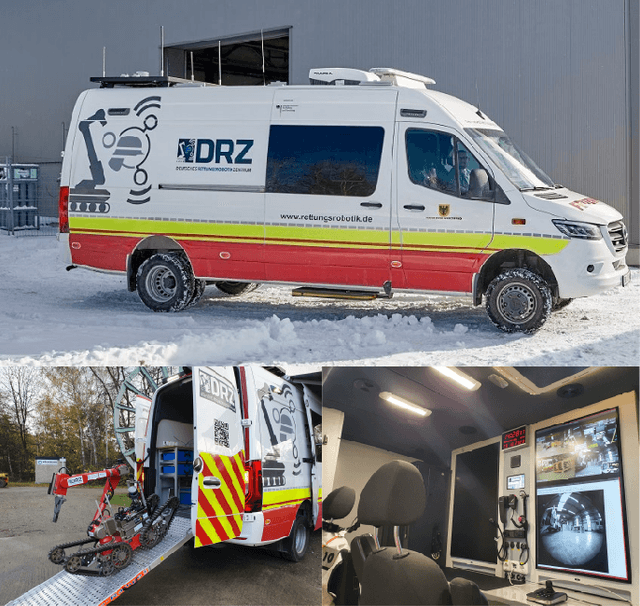



This technical report is about the mission and the experience gained during the reconnaissance of an industrial hall with hazardous substances after a major fire in Berlin. During this operation, only UAVs and cameras were used to obtain information about the site and the building. First, a geo-referenced 3D model of the building was created in order to plan the entry into the hall. Subsequently, the UAVs were used to fly in the heavily damaged interior and take pictures from inside of the hall. A 360{\deg} camera mounted under the UAV was used to collect images of the surrounding area especially from sections that were difficult to fly into. Since the collected data set contained similar images as well as blurred images, it was cleaned from non-optimal images using visual SLAM, bundle adjustment and blur detection so that a 3D model and overviews could be calculated. It was shown that the emergency services were not able to extract the necessary information from the 3D model. Therefore, an interactive panorama viewer with links to other 360{\deg} images was implemented where the links to the other images depends on the semi dense point cloud and located camera positions of the visual SLAM algorithm so that the emergency forces could view the surroundings.