 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnbalanced Fingerprint Classification for Hybrid Fingerprint Orientation Maps
Sep 01, 2024



This paper introduces a novel fingerprint classification technique based on a multi-layered fuzzy logic classifier. We target the cause of missed detection by identifying the fingerprints at an early stage among dry, standard, and wet. Scanned images are classified based on clarity correlated with the proposed feature points. We also propose a novel adaptive algorithm based on eigenvector space for generating new samples to overcome the multiclass imbalance. Proposed methods improve the performance of ensemble learners. It was also found that the new approach performs better than the neural-network based classification methods. Early-stage improvements give a suitable dataset for fingerprint detection models. Leveraging the novel classifier, the best set of `standard' labelled fingerprints is used to generate a unique hybrid fingerprint orientation map (HFOM). We introduce a novel min-rotate max-flow optimization method inspired by the min-cut max-flow algorithm. The unique properties of HFOM generation introduce a new use case for biometric data protection by using HFOM as a virtual proxy of fingerprints.
Epidemic Control Modeling using Parsimonious Models and Markov Decision Processes
Jun 23, 2022
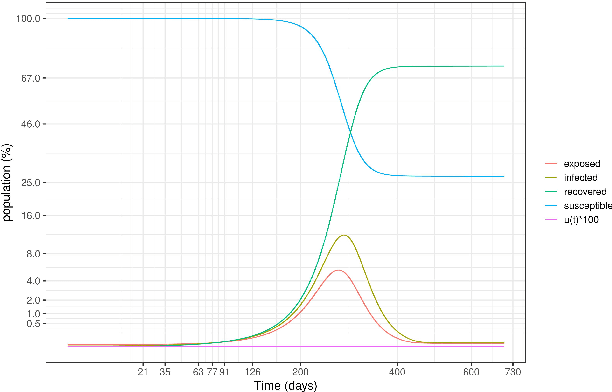

Many countries have experienced at least two waves of the COVID-19 pandemic. The second wave is far more dangerous as distinct strains appear more harmful to human health, but it stems from the complacency about the first wave. This paper introduces a parsimonious yet representative stochastic epidemic model that simulates the uncertain spread of the disease regardless of the latency and recovery time distributions. We also propose a Markov decision process to seek an optimal trade-off between the usage of the healthcare system and the economic costs of an epidemic. We apply the model to COVID-19 data from New Delhi, India and simulate the epidemic spread with different policy review times. The results show that the optimal policy acts swiftly to curb the epidemic in the first wave, thus avoiding the collapse of the healthcare system and the future costs of posterior outbreaks. An analysis of the recent collapse of the healthcare system of India during the second COVID-19 wave suggests that many lives could have been preserved if swift mitigation was promoted after the first wave.
Designing MacPherson Suspension Architectures using Bayesian Optimization
Jun 17, 2022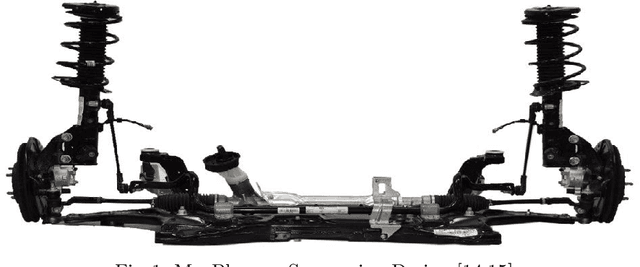
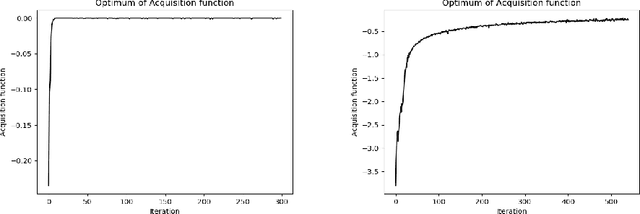
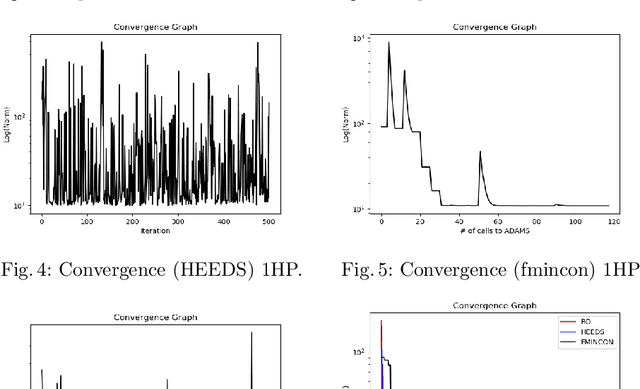
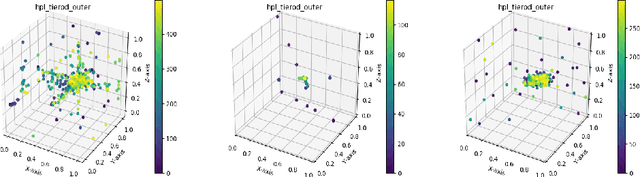
Engineering design is traditionally performed by hand: an expert makes design proposals based on past experience, and these proposals are then tested for compliance with certain target specifications. Testing for compliance is performed first by computer simulation using what is called a discipline model. Such a model can be implemented by a finite element analysis, multibody systems approach, etc. Designs passing this simulation are then considered for physical prototyping. The overall process may take months, and is a significant cost in practice. We have developed a Bayesian optimization system for partially automating this process by directly optimizing compliance with the target specification with respect to the design parameters. The proposed method is a general framework for computing a generalized inverse of a high-dimensional non-linear function that does not require e.g. gradient information, which is often unavailable from discipline models. We furthermore develop a two-tier convergence criterion based on (i) convergence to a solution optimally satisfying all specified design criteria, or (ii) convergence to a minimum-norm solution. We demonstrate the proposed approach on a vehicle chassis design problem motivated by an industry setting using a state-of-the-art commercial discipline model. We show that the proposed approach is general, scalable, and efficient, and that the novel convergence criteria can be implemented straightforwardly based on existing concepts and subroutines in popular Bayesian optimization software packages.
Causal Discovery in Knowledge Graphs by Exploiting Asymmetric Properties of Non-Gaussian Distributions
Jun 02, 2021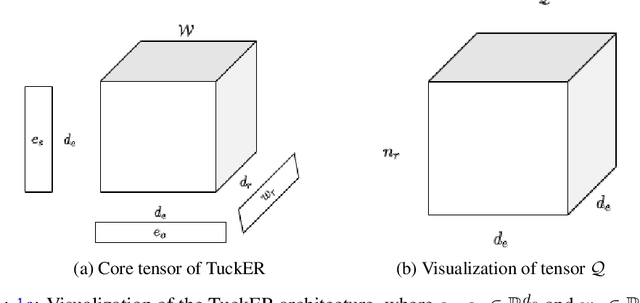

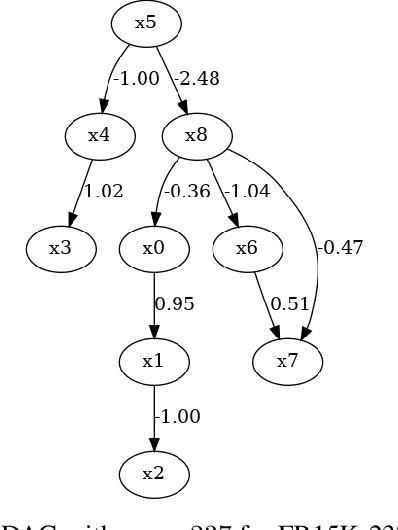
In recent years, causal modelling has been used widely to improve generalization and to provide interpretability in machine learning models. To determine cause-effect relationships in the absence of a randomized trial, we can model causal systems with counterfactuals and interventions given enough domain knowledge. However, there are several cases where domain knowledge is almost absent and the only recourse is using a statistical method to estimate causal relationships. While there have been several works done in estimating causal relationships in unstructured data, we are yet to find a well-defined framework for estimating causal relationships in Knowledge Graphs (KG). It is commonly used to provide a semantic framework for data with complex inter-domain relationships. In this work, we define a hybrid approach that allows us to discover cause-effect relationships in KG. The proposed approach is based around the finding of the instantaneous causal structure of a non-experimental matrix using a non-Gaussian model, i.e; finding the causal ordering of the variables in a non-Gaussian setting. The non-experimental matrix is a low-dimensional tensor projection obtained by decomposing the adjacency tensor of a KG. We use two different pre-existing algorithms, one for the causal discovery and the other for decomposing the KG and combining them to get the causal structure in a KG.
Make Bipedal Robots Learn How to Imitate
May 15, 2021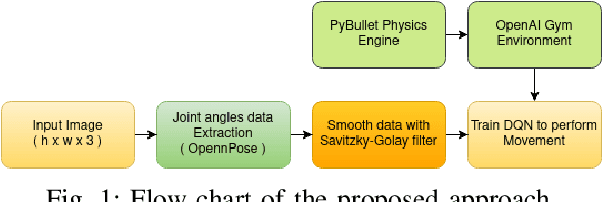
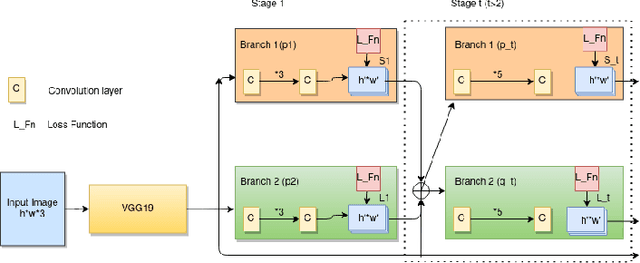
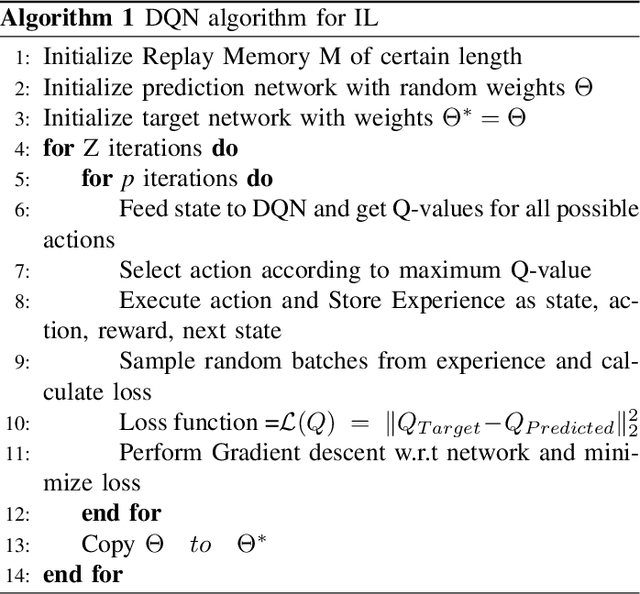
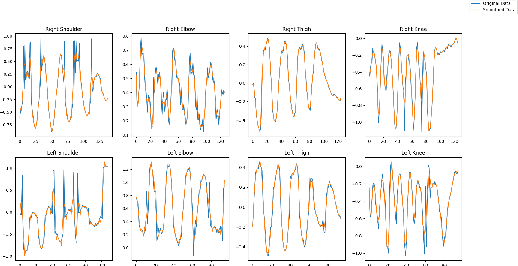
Bipedal robots do not perform well as humans since they do not learn to walk like we do. In this paper we propose a method to train a bipedal robot to perform some basic movements with the help of imitation learning (IL) in which an instructor will perform the movement and the robot will try to mimic the instructor movement. To the best of our knowledge, this is the first time we train the robot to perform movements with a single video of the instructor and as the training is done based on joint angles the robot will keep its joint angles always in physical limits which in return help in faster training. The joints of the robot are identified by OpenPose architecture and then joint angle data is extracted with the help of angle between three points resulting in a noisy solution. We smooth the data using Savitzky-Golay filter and preserve the Simulatore data anatomy. An ingeniously written Deep Q Network (DQN) is trained with experience replay to make the robot learn to perform the movements as similar as the instructor. The implementation of the paper is made publicly available.