 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChemotaxis Based Virtual Fence for Swarm Robots in Unbounded Environments
Jun 18, 2019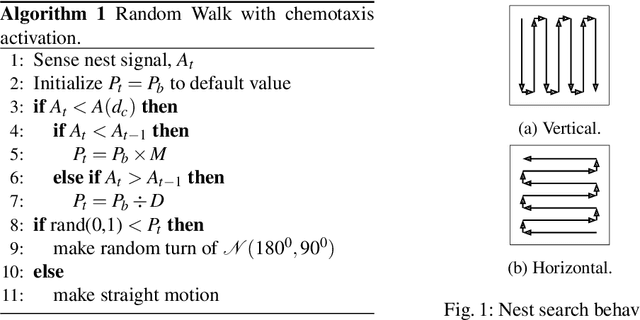
This paper presents a novel swarm robotics application of chemotaxis behaviour observed in microorganisms. This approach was used to cause exploration robots to return to a work area around the swarm's nest within a boundless environment. We investigate the performance of our algorithm through extensive simulation studies and hardware validation. Results show that the chemotaxis approach is effective for keeping the swarm close to both stationary and moving nests. Performance comparison of these results with the unrealistic case where a boundary wall was used to keep the swarm within a target search area showed that our chemotaxis approach produced competitive results.
Simple Swarm Foraging Algorithm Based on Gradient Computation
Jun 17, 2019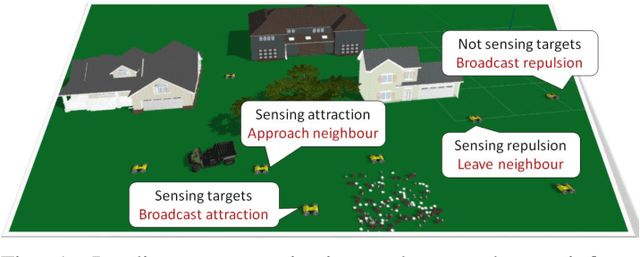


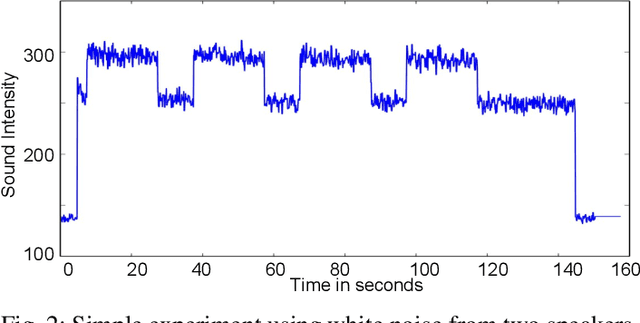
Swarm foraging is a common test case application for multi-robot systems. In this paper we present a novel algorithm for controlling swarm robots with limited communication range and storage capacity to efficiently search for and retrieve targets within an unknown environment. In our approach, robots search using random walk and adjust their turn probability based on attraction and repulsion signals they sense from other robots. We compared our algorithm with five different variations reflecting absence or presence of attractive and/or repulsive communication signals. Our results show that best performance is achieved when both signals are used by robots for communication. Furthermore, we show through hardware experiments how the communication model we used in the simulation could be realized on real robots.