Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChemotaxis Based Virtual Fence for Swarm Robots in Unbounded Environments
Paper and Code
Jun 18, 2019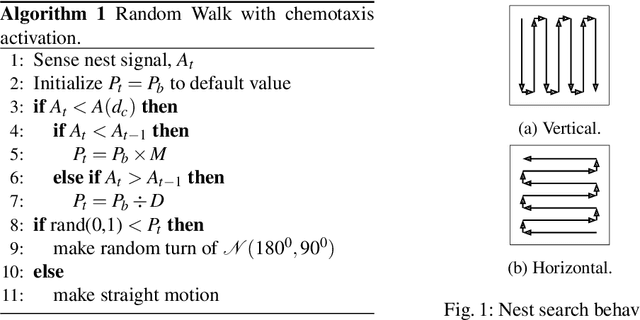
This paper presents a novel swarm robotics application of chemotaxis behaviour observed in microorganisms. This approach was used to cause exploration robots to return to a work area around the swarm's nest within a boundless environment. We investigate the performance of our algorithm through extensive simulation studies and hardware validation. Results show that the chemotaxis approach is effective for keeping the swarm close to both stationary and moving nests. Performance comparison of these results with the unrealistic case where a boundary wall was used to keep the swarm within a target search area showed that our chemotaxis approach produced competitive results.
* Paper accepted for living machines 2019 conference
View paper on