Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-view and Cross-domain Underwater Localization based on Optical Aerial and Acoustic Underwater Images
Feb 16, 2022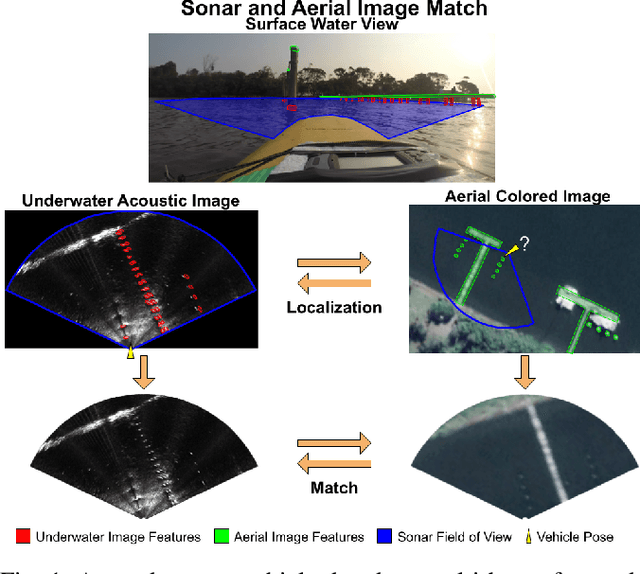

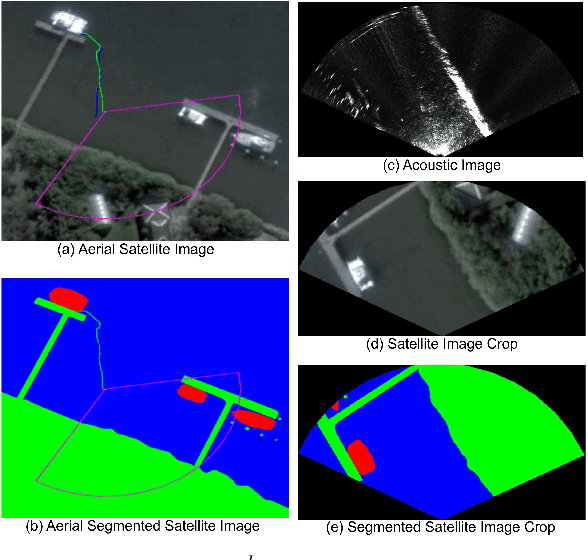
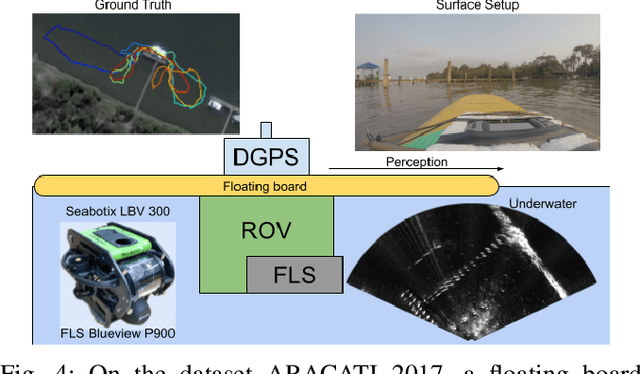
Cross-view image matches have been widely explored on terrestrial image localization using aerial images from drones or satellites. This study expands the cross-view image match idea and proposes a cross-domain and cross-view localization framework. The method identifies the correlation between color aerial images and underwater acoustic images to improve the localization of underwater vehicles that travel in partially structured environments such as harbors and marinas. The approach is validated on a real dataset acquired by an underwater vehicle in a marina. The results show an improvement in the localization when compared to the dead reckoning of the vehicle.
* This work has been submitted to the IEEE Robotics and Automation
Letters (RA-L) for possible publication. Copyright may be transferred without
notice, after which this version may no longer be accessible
Via