 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-based Kinodynamic Motion Planning for Omnidirectional Quadruped Robots
Nov 02, 2020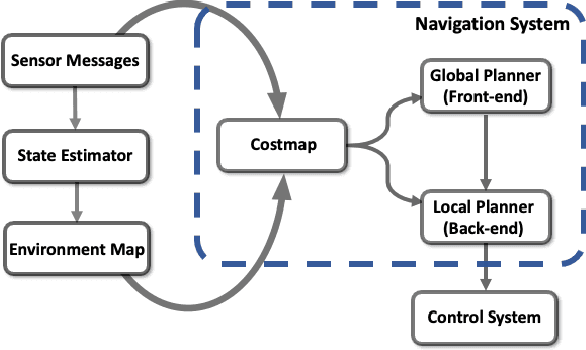
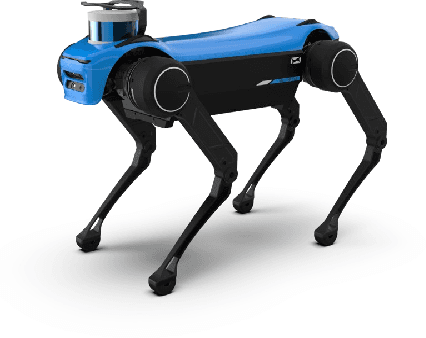
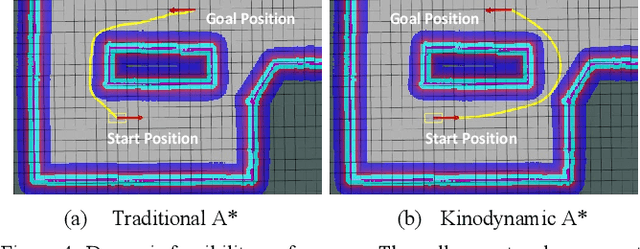
Autonomous navigation has played an increasingly significant role in quadruped robots system. However, existing works on path planning used traditional search-based or sample-based methods which did not consider the kinodynamic characteristics of quadruped robots. And paths generated by these methods contain kinodynamically infeasible parts, which are difficult to track. In the present work, we introduced a complete navigation system considering the omnidirectional abilities of quadruped robots. First, we use kinodynamic path finding method to obtain smooth, dynamically feasible, time-optimal initial paths and added collision cost as a soft constraint to ensure safety. Then the trajectory is refined by timed elastic band (TEB) method based on the omnidirectional model of quadruped robot. The superior performance of our work is demonstrated through simulated comparisons and by using our quadruped robot Jueying Mini in our experiments.