Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn enhanced motion planning approach by integrating driving heterogeneity and long-term trajectory prediction for automated driving systems
Aug 02, 2023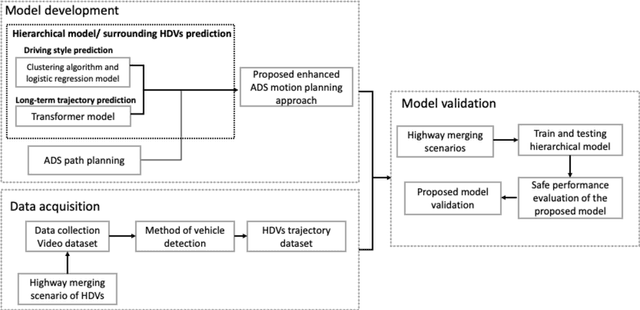
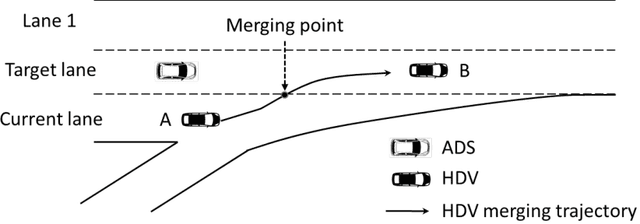

Navigating automated driving systems (ADSs) through complex driving environments is difficult. Predicting the driving behavior of surrounding human-driven vehicles (HDVs) is a critical component of an ADS. This paper proposes an enhanced motion-planning approach for an ADS in a highway-merging scenario. The proposed enhanced approach utilizes the results of two aspects: the driving behavior and long-term trajectory of surrounding HDVs, which are coupled using a hierarchical model that is used for the motion planning of an ADS to improve driving safety.
* 33 pages, 5 figures
Via