 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Online Life-Long Learning (DOL3) for Multi-agent Trust and Reputation Assessment in E-commerce
Oct 21, 2024
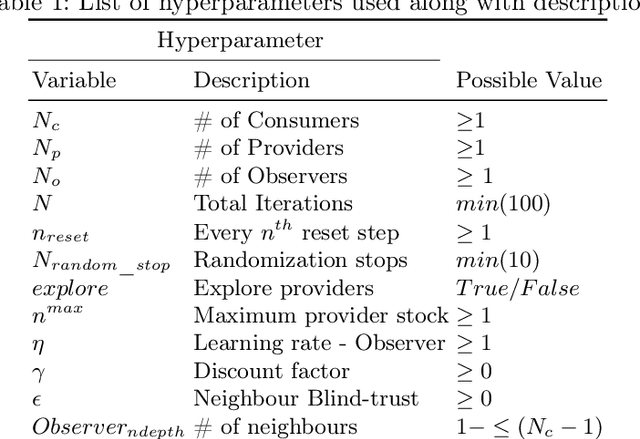
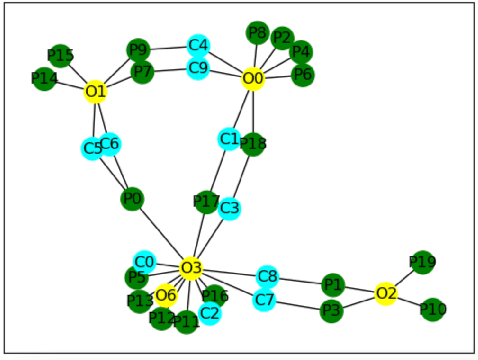

Trust and Reputation Assessment of service providers in citizen-focused environments like e-commerce is vital to maintain the integrity of the interactions among agents. The goals and objectives of both the service provider and service consumer agents are relevant to the goals of the respective citizens (end users). The provider agents often pursue selfish goals that can make the service quality highly volatile, contributing towards the non-stationary nature of the environment. The number of active service providers tends to change over time resulting in an open environment. This necessitates a rapid and continual assessment of the Trust and Reputation. A large number of service providers in the environment require a distributed multi-agent Trust and Reputation assessment. This paper addresses the problem of multi-agent Trust and Reputation Assessment in a non-stationary environment involving transactions between providers and consumers. In this setting, the observer agents carry out the assessment and communicate their assessed trust scores with each other over a network. We propose a novel Distributed Online Life-Long Learning (DOL3) algorithm that involves real-time rapid learning of trust and reputation scores of providers. Each observer carries out an adaptive learning and weighted fusion process combining their own assessment along with that of their neighbour in the communication network. Simulation studies reveal that the state-of-the-art methods, which usually involve training a model to assess an agent's trust and reputation, do not work well in such an environment. The simulation results show that the proposed DOL3 algorithm outperforms these methods and effectively handles the volatility in such environments. From the statistical evaluation, it is evident that DOL3 performs better compared to other models in 90% of the cases.
Decentralized Distributed Expert Assisted Learning (D2EAL) approach for cooperative target-tracking
Sep 22, 2022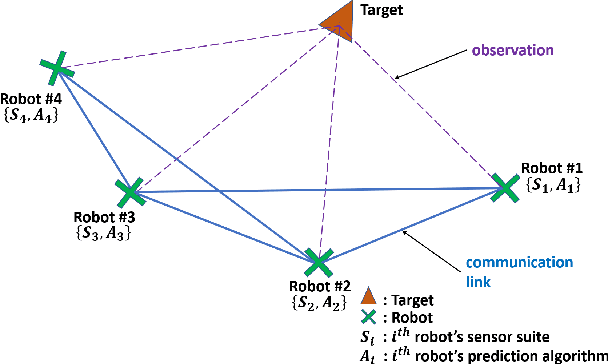
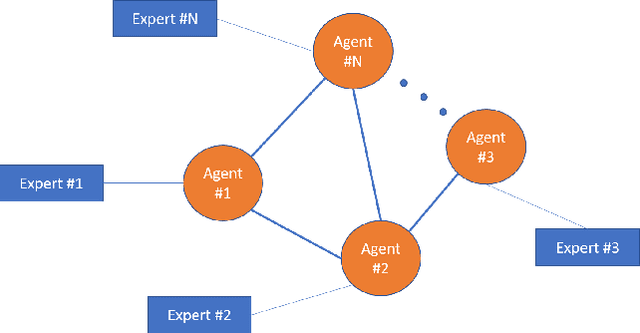

This paper addresses the problem of cooperative target tracking using a heterogeneous multi-robot system, where the robots are communicating over a dynamic communication network, and heterogeneity is in terms of different types of sensors and prediction algorithms installed in the robots. The problem is cast into a distributed learning framework, where robots are considered as 'agents' connected over a dynamic communication network. Their prediction algorithms are considered as 'experts' giving their look-ahead predictions of the target's trajectory. In this paper, a novel Decentralized Distributed Expert-Assisted Learning (D2EAL) algorithm is proposed, which improves the overall tracking performance by enabling each robot to improve its look-ahead prediction of the target's trajectory by its information sharing, and running a weighted information fusion process combined with online learning of weights based on a prediction loss metric. Theoretical analysis of D2EAL is carried out, which involves the analysis of worst-case bounds on cumulative prediction loss, and weights convergence analysis. Simulation studies show that in adverse scenarios involving large dynamic bias or drift in the expert predictions, D2EAL outperforms well-known covariance-based estimate/prediction fusion methods, both in terms of prediction performance and scalability.