 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning Driven Cooperative Ball Balance in Rigidly Coupled Drones
Apr 29, 2024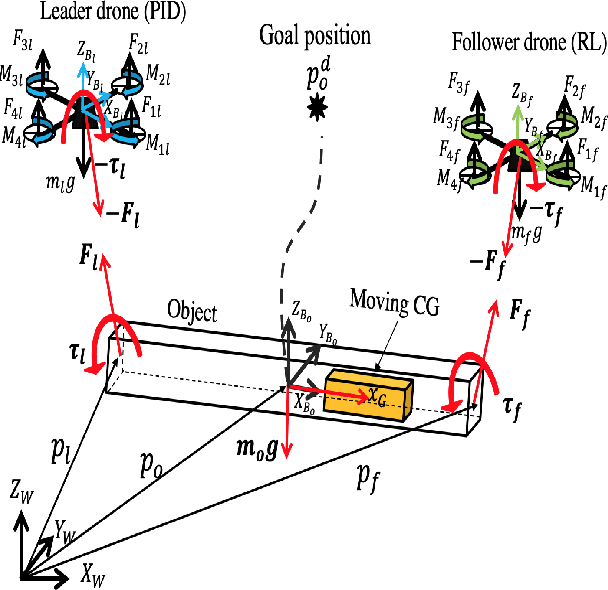
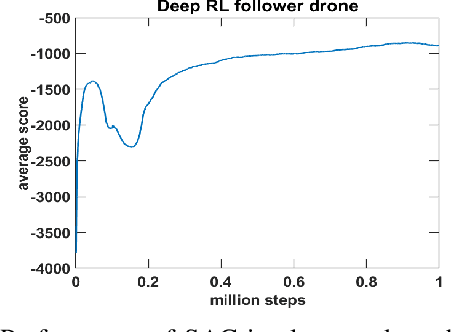
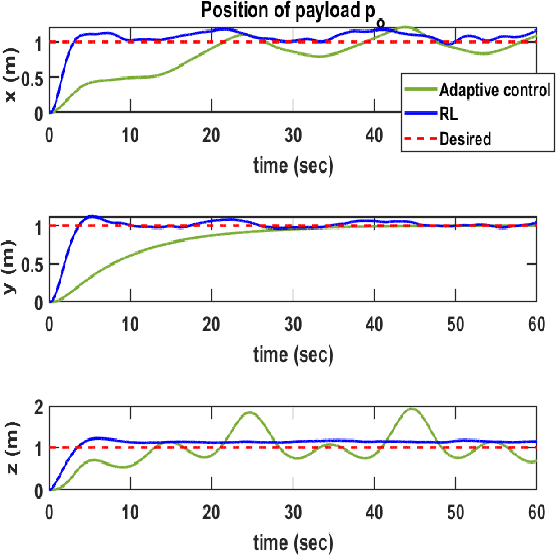
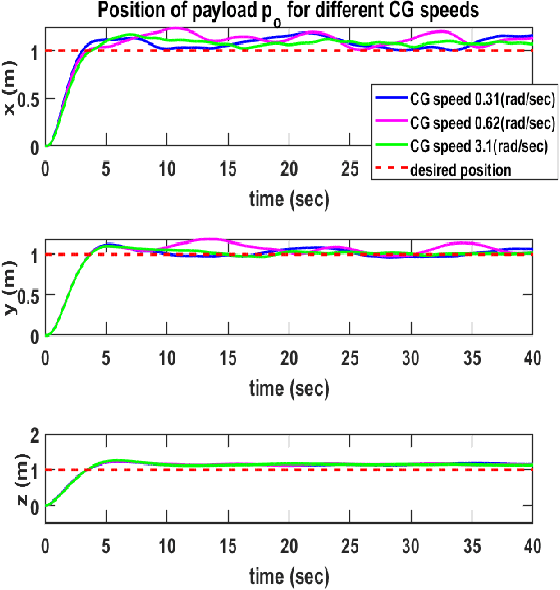
Multi-drone cooperative transport (CT) problem has been widely studied in the literature. However, limited work exists on control of such systems in the presence of time-varying uncertainties, such as the time-varying center of gravity (CG). This paper presents a leader-follower approach for the control of a multi-drone CT system with time-varying CG. The leader uses a traditional Proportional-Integral-Derivative (PID) controller, and in contrast, the follower uses a deep reinforcement learning (RL) controller using only local information and minimal leader information. Extensive simulation results are presented, showing the effectiveness of the proposed method over a previously developed adaptive controller and for variations in the mass of the objects being transported and CG speeds. Preliminary experimental work also demonstrates ball balance (depicting moving CG) on a stick/rod lifted by two Crazyflie drones cooperatively.