 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Batched Distance Computation for Time-Optimal Safe Path Tracking
Sep 21, 2023



In human-robot collaboration, there has been a trade-off relationship between the speed of collaborative robots and the safety of human workers. In our previous paper, we introduced a time-optimal path tracking algorithm designed to maximize speed while ensuring safety for human workers. This algorithm runs in real-time and provides the safe and fastest control input for every cycle with respect to ISO standards. However, true optimality has not been achieved due to inaccurate distance computation resulting from conservative model simplification. To attain true optimality, we require a method that can compute distances 1. at many robot configurations to examine along a trajectory 2. in real-time for online robot control 3. as precisely as possible for optimal control. In this paper, we propose a batched, fast and precise distance checking method based on precomputed link-local SDFs. Our method can check distances for 500 waypoints along a trajectory within less than 1 millisecond using a GPU at runtime, making it suited for time-critical robotic control. Additionally, a neural approximation has been proposed to accelerate preprocessing by a factor of 2. Finally, we experimentally demonstrate that our method can navigate a 6-DoF robot earlier than a geometric-primitives-based distance checker in a dynamic and collaborative environment.
Time-Optimal Path Tracking with ISO Safety Guarantees
Jun 08, 2023One way of ensuring operator's safety during human-robot collaboration is through Speed and Separation Monitoring (SSM), as defined in ISO standard ISO/TS 15066. In general, it is impossible to avoid all human-robot collisions: consider for instance the case when the robot does not move at all, a human operator can still collide with it by hitting it of her own voluntary motion. In the SSM framework, it is possible however to minimize harm by requiring this: \emph{if} a collision ever occurs, then the robot must be in a \emph{stationary state} (all links have zero velocity) at the time instant of the collision. In this paper, we propose a time-optimal control policy based on Time-Optimal Path Parameterization (TOPP) to guarantee such a behavior. Specifically, we show that: for any robot motion that is strictly faster than the motion recommended by our policy, there exists a human motion that results in a collision with the robot in a non-stationary state. Correlatively, we show, in simulation, that our policy is strictly less conservative than state-of-the-art safe robot control methods. Additionally, we propose a parallelization method to reduce the computation time of our pre-computation phase (down to 0.5 sec, practically), which enables the whole pipeline (including the pre-computation) to be executed at runtime, nearly in real-time. Finally, we demonstrate the application of our method in a scenario: time-optimal, safe control of a 6-dof industrial robot.
Realtime Trajectory Smoothing with Neural Nets
Nov 03, 2021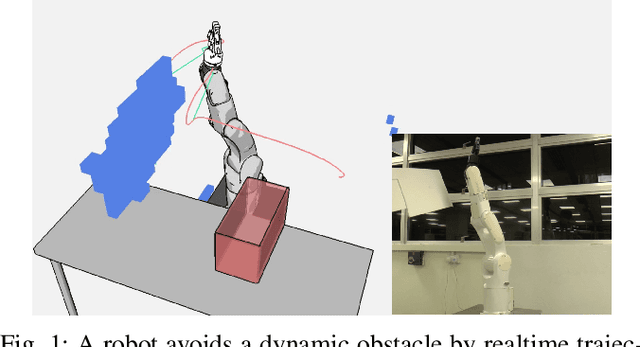
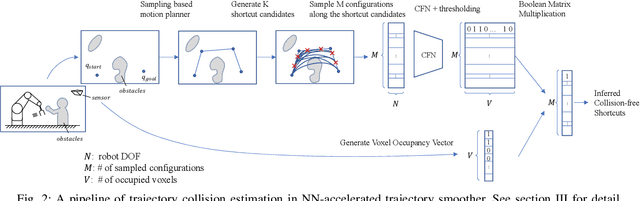
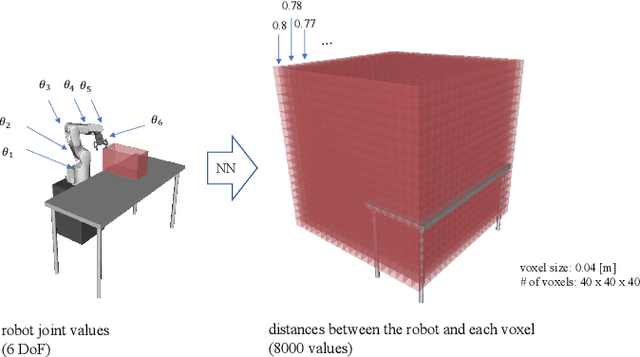
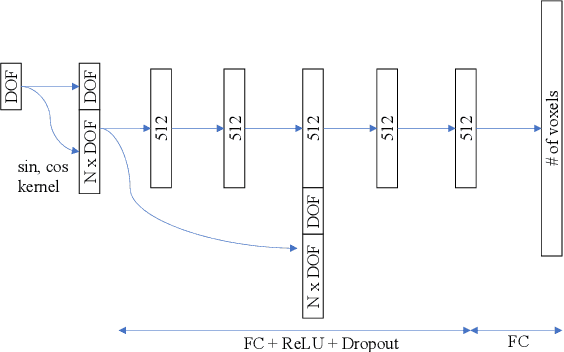
In order to safely and efficiently collaborate with humans, industrial robots need the ability to alter their motions quickly to react to sudden changes in the environment, such as an obstacle appearing across a planned trajectory. In Realtime Motion Planning, obstacles are detected in real time through a vision system, and new trajectories are planned with respect to the current positions of the obstacles, and immediately executed on the robot. Existing realtime motion planners, however, lack the smoothing post-processing step -- which are crucial in sampling-based motion planning -- resulting in the planned trajectories being jerky, and therefore inefficient and less human-friendly. Here we propose a Realtime Trajectory Smoother based on the shortcutting technique to address this issue. Leveraging fast clearance inference by a novel neural network, the proposed method is able to consistently smooth the trajectories of a 6-DOF industrial robot arm within 200 ms on a commercial GPU. We integrate the proposed smoother into a full Vision--Motion Planning--Execution loop and demonstrate a realtime, smooth, performance of an industrial robot subject to dynamic obstacles.