 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Implementation of a General Decision-making Model in RoboCup Simulation
Nov 08, 2004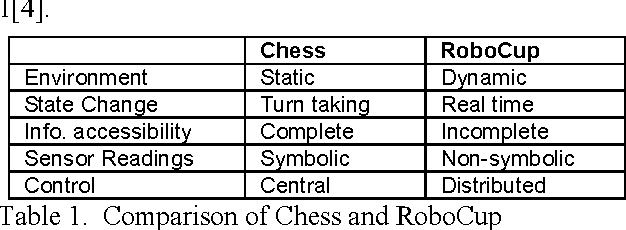
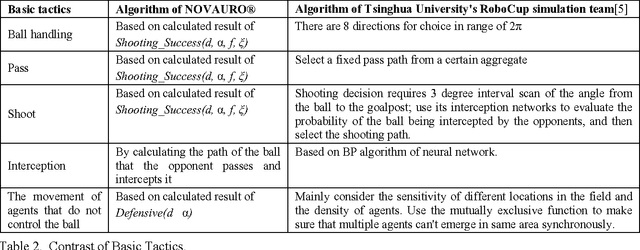
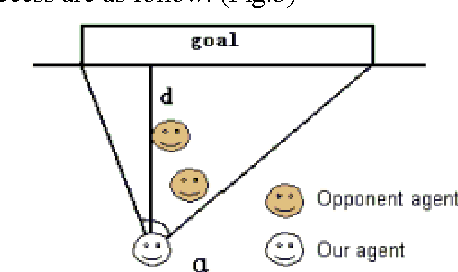
The study of the collaboration, coordination and negotiation among different agents in a multi-agent system (MAS) has always been the most challenging yet popular in the research of distributed artificial intelligence. In this paper, we will suggest for RoboCup simulation, a typical MAS, a general decision-making model, rather than define a different algorithm for each tactic (e.g. ball handling, pass, shoot and interception, etc.) in soccer games as most RoboCup simulation teams did. The general decision-making model is based on two critical factors in soccer games: the vertical distance to the goal line and the visual angle for the goalpost. We have used these two parameters to formalize the defensive and offensive decisions in RoboCup simulation and the results mentioned above had been applied in NOVAURO, original name is UJDB, a RoboCup simulation team of Jiangsu University, whose decision-making model, compared with that of Tsinghua University, the world champion team in 2001, is a universal model and easier to be implemented.