 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Trajectory Prediction by Transfer Learning of Semi-Supervised Models
Jul 14, 2020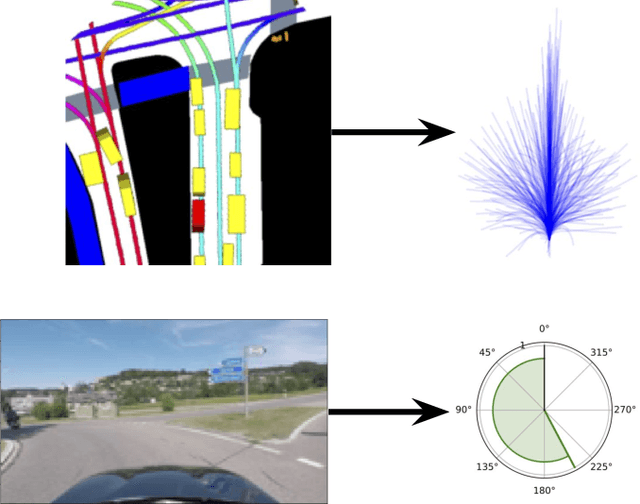
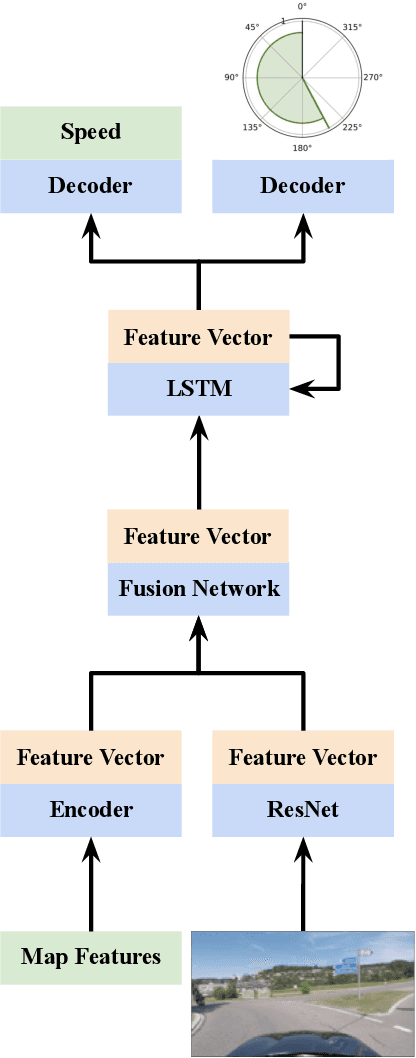
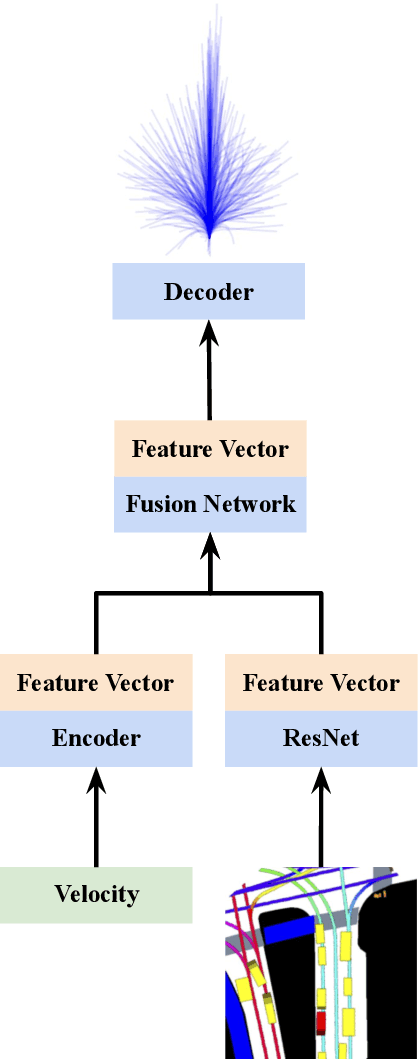
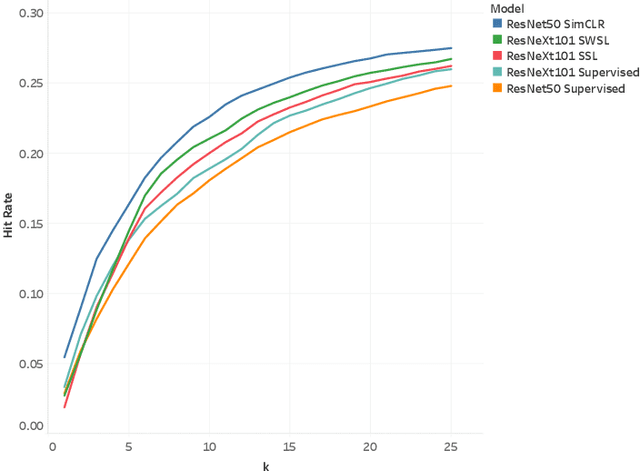
In this work we show that semi-supervised models for vehicle trajectory prediction significantly improve performance over supervised models on state-of-the-art real-world benchmarks. Moving from supervised to semi-supervised models allows scaling-up by using unlabeled data, increasing the number of images in pre-training from Millions to a Billion. We perform ablation studies comparing transfer learning of semi-supervised and supervised models while keeping all other factors equal. Within semi-supervised models we compare contrastive learning with teacher-student methods as well as networks predicting a small number of trajectories with networks predicting probabilities over a large trajectory set. Our results using both low-level and mid-level representations of the driving environment demonstrate the applicability of semi-supervised methods for real-world vehicle trajectory prediction.