 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Genomic Evolution of Neural Network Topologies (AGENT) for State-to-Action Mapping in Autonomous Agents
Mar 17, 2019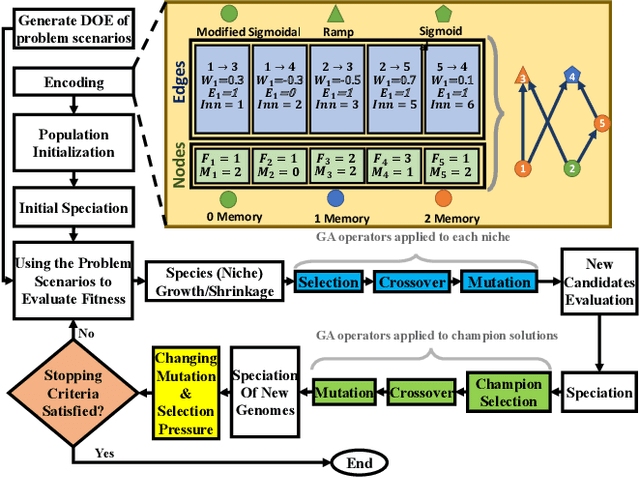
Neuroevolution is a process of training neural networks (NN) through an evolutionary algorithm, usually to serve as a state-to-action mapping model in control or reinforcement learning-type problems. This paper builds on the Neuro Evolution of Augmented Topologies (NEAT) formalism that allows designing topology and weight evolving NNs. Fundamental advancements are made to the neuroevolution process to address premature stagnation and convergence issues, central among which is the incorporation of automated mechanisms to control the population diversity and average fitness improvement within the neuroevolution process. Insights into the performance and efficiency of the new algorithm is obtained by evaluating it on three benchmark problems from the Open AI platform and an Unmanned Aerial Vehicle (UAV) collision avoidance problem.
Multi-criteria Evolution of Neural Network Topologies: Balancing Experience and Performance in Autonomous Systems
Jul 20, 2018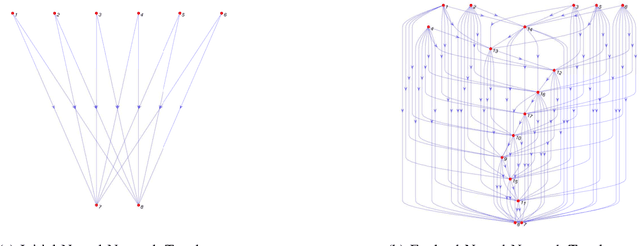
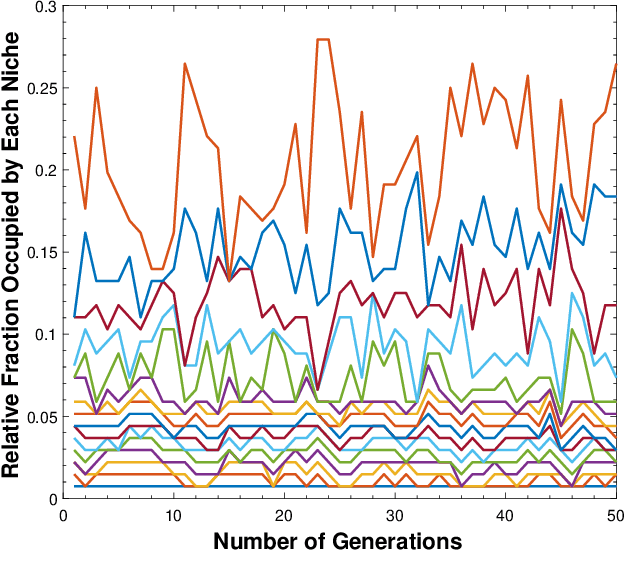
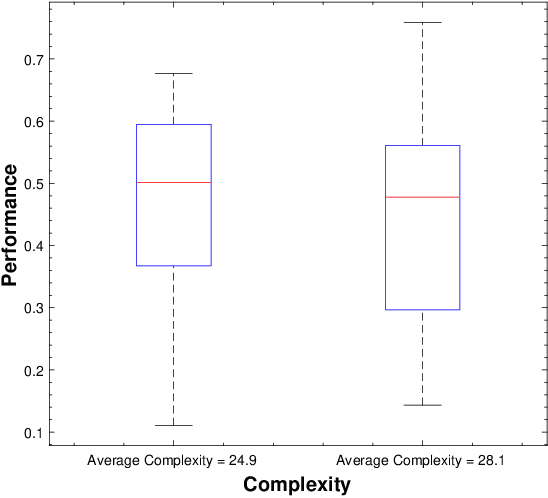
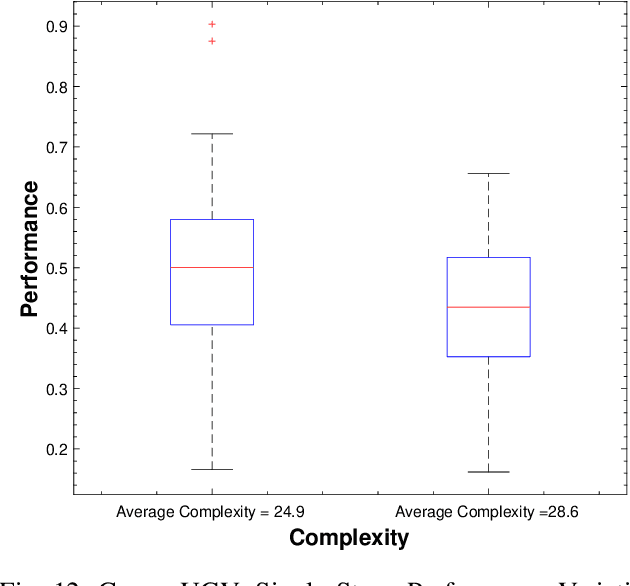
Majority of Artificial Neural Network (ANN) implementations in autonomous systems use a fixed/user-prescribed network topology, leading to sub-optimal performance and low portability. The existing neuro-evolution of augmenting topology or NEAT paradigm offers a powerful alternative by allowing the network topology and the connection weights to be simultaneously optimized through an evolutionary process. However, most NEAT implementations allow the consideration of only a single objective. There also persists the question of how to tractably introduce topological diversification that mitigates overfitting to training scenarios. To address these gaps, this paper develops a multi-objective neuro-evolution algorithm. While adopting the basic elements of NEAT, important modifications are made to the selection, speciation, and mutation processes. With the backdrop of small-robot path-planning applications, an experience-gain criterion is derived to encapsulate the amount of diverse local environment encountered by the system. This criterion facilitates the evolution of genes that support exploration, thereby seeking to generalize from a smaller set of mission scenarios than possible with performance maximization alone. The effectiveness of the single-objective (optimizing performance) and the multi-objective (optimizing performance and experience-gain) neuro-evolution approaches are evaluated on two different small-robot cases, with ANNs obtained by the multi-objective optimization observed to provide superior performance in unseen scenarios.