Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Based Navigation of Mobile Robots
Dec 15, 2017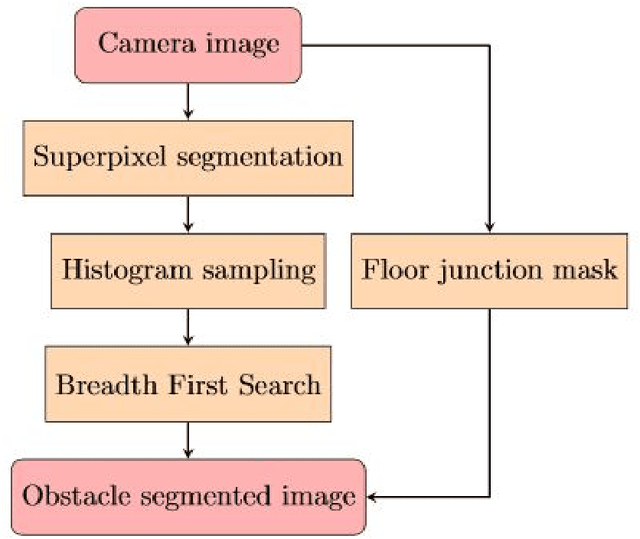
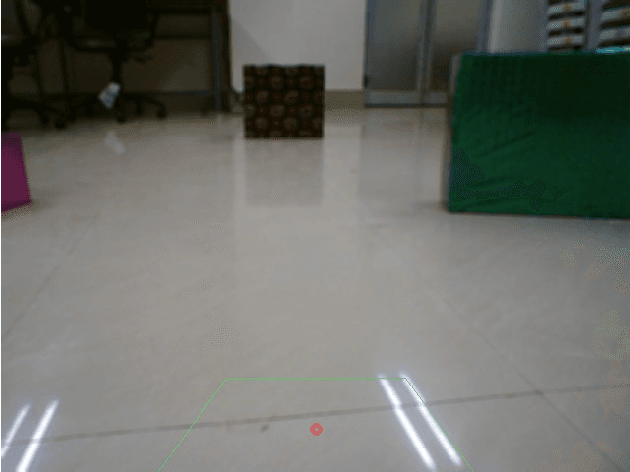
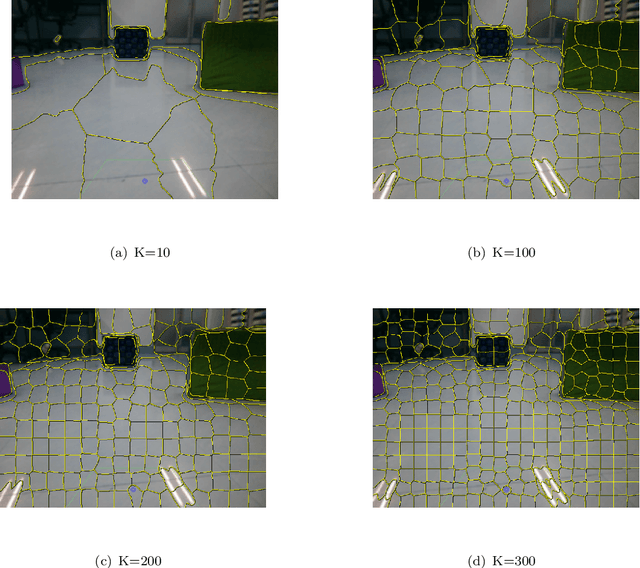
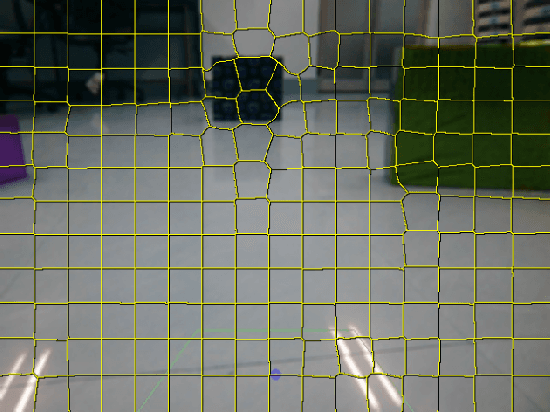
We have developed an algorithm to generate a complete map of the traversable region for a personal assistant robot using monocular vision only. Using multiple taken by a simple webcam, obstacle detection and avoidance algorithms have been developed. Simple Linear Iterative Clustering (SLIC) has been used for segmentation to reduce the memory and computation cost. A simple mapping technique using inverse perspective mapping and occupancy grids, which is robust, and supports very fast updates has been used to create the map for indoor navigation.
* Bachelor Thesis, Electrical Engineering Department, IIT Kharagpur,
2016
Via